БОЮФВтЪдбщжЄ ZMC900EЫЋТЗEtherCATжїеОЃЌ125us+1msжмЦкЯТЮШЖЈдЫааЃЌЮЂУыМЖЖЖЖЏЁЂСуЖЊАќЃЌЪЪХфИпОЋЖШЙЄвЕПижЦЁЃ
 БГОАдкЙЄвЕздЖЏЛЏЯђИпОЋЖШЁЂИпЭЌВНЁЂЖржсаЭЌЗЂеЙЕФЕБЯТЃЌEtherCAT змЯпЦОНшИпЫйЪЕЪБЁЂЭиЦЫСщЛюЕФгХЪЦГЩЮЊдЫЖЏПижЦСьгђЕФжїСїбЁдёЃЌЖјЫЋТЗ EtherCAT жїеОПижЦЦїИќЪЧФмТњзуИДдгВњЯпЕФЖрГЁОАЗжЧјПижЦашЧѓЁЃZMC900E дЫЖЏПижЦЦїзїЮЊвЛПюДюдиЫЋТЗ EtherCAT жїеОЕФИпадФмЩшБИЃЌЦфЪЕМЪдЫааЕФЮШЖЈадЁЂЪЕЪБадМАЪ§ОнЭъећаджБНгОіЖЈЙЄвЕЯжГЁЕФПижЦаЇЙћЁЃБОЮФЛљгк ZMC900E EtherCAT ЫЋТЗжїеОЕФШЋЮЌЖШадФмВтЪдЃЌЩюШыНтЮіЦфдкИпЦЕТЪЭЈаХЁЂЖрДгеОЙвдиЁЂГЄЪБМфСЌајдЫааГЁОАЯТЕФММЪѕБэЯжЃЌЮЊЙЄвЕПижЦЙЄГЬгІгУЬсЙЉЪЕВтВЮПМЁЃ
БГОАдкЙЄвЕздЖЏЛЏЯђИпОЋЖШЁЂИпЭЌВНЁЂЖржсаЭЌЗЂеЙЕФЕБЯТЃЌEtherCAT змЯпЦОНшИпЫйЪЕЪБЁЂЭиЦЫСщЛюЕФгХЪЦГЩЮЊдЫЖЏПижЦСьгђЕФжїСїбЁдёЃЌЖјЫЋТЗ EtherCAT жїеОПижЦЦїИќЪЧФмТњзуИДдгВњЯпЕФЖрГЁОАЗжЧјПижЦашЧѓЁЃZMC900E дЫЖЏПижЦЦїзїЮЊвЛПюДюдиЫЋТЗ EtherCAT жїеОЕФИпадФмЩшБИЃЌЦфЪЕМЪдЫааЕФЮШЖЈадЁЂЪЕЪБадМАЪ§ОнЭъећаджБНгОіЖЈЙЄвЕЯжГЁЕФПижЦаЇЙћЁЃБОЮФЛљгк ZMC900E EtherCAT ЫЋТЗжїеОЕФШЋЮЌЖШадФмВтЪдЃЌЩюШыНтЮіЦфдкИпЦЕТЪЭЈаХЁЂЖрДгеОЙвдиЁЂГЄЪБМфСЌајдЫааГЁОАЯТЕФММЪѕБэЯжЃЌЮЊЙЄвЕПижЦЙЄГЬгІгУЬсЙЉЪЕВтВЮПМЁЃ
 ВтЪдКЫаФФПБъгыЛЗОГДюНЈБОДЮВтЪдвдбщжЄ ZMC900E ЫЋТЗ EtherCAT жїеОЕФЙЄвЕМЖадФмЮЊКЫаФЃЌжиЕуВтЪджїеО 1 вд 8KHzЃЈ125usЃЉИпЦЕжмЦкЁЂжїеО 2 вдВЛЭЌжмЦкВЂаадЫааЪБЕФЮШЖЈадЁЂЪЕЪБадЁЂЪ§ОнЭъећадЃЌЭЌЪБбщжЄЫЋТЗжїеОГЄЪБМфСЌајЙЄзїЕФПЩППадЃЌвдМАзюДѓДгеОЙвдиФмСІЃЌШЗШЯЦфЪЧЗёТњзуЪ§ПиЛњДВЁЂЙЄвЕЛњЦїШЫЁЂздЖЏЛЏВњЯпЕШИпадФмПижЦГЁОАашЧѓЁЃВтЪдгВМўВЩгУ ZMC900E дЫЖЏПижЦЦїзїЮЊКЫаФЃЌДюХф 43 ЬЈЙЄвЕМЖ EtherCAT ДгеОЩшБИЃЈжїеО 1 Йвди 28 ЬЈЃЌКЌ DI/DO ЩшБИЁЂЫЩЯТ / ЛуДЈ / ЬЈДяЖрЦЗХЦЫХЗўЧ§ЖЏЦїЃЛжїеО 2 Йвди 15 ЬЈЃЌКЌёюКЯЦїЁЂБЖИЃ EL ЯЕСаФЃПщЁЂZIOC/ZDM ЯЕСа IO ЩшБИЃЉЃЌИЈвд EtherCAT зЈгУЗжЮівЧЁЂ24V ЙЄвЕЕчдДЁЂЙЄвЕМЖЭјЯпЕШИЈВФЃЛШэМўВуУцВЩгУ AWStudio ЩЯЮЛЛњЭъГЩ EtherCAT ЭјТчХфжУЁЂЪЕЪБМрПигыЪ§ОнВЩМЏЃЌNetAnalyzer ЗжЮівЧЪЕЯж PDO жЁЙ§ТЫЁЂЖЖЖЏЭГМЦгыбгЪБЗжЮіЃЌЭЌЪББраДЖЈжЦЛЏВтЪдГЬађЪЕЯжЫХЗў CSP ФЃЪНдЫЖЏПижЦЁЂDI/DO гВМўЖдНгЖСаДВтЪдЁЃ
ВтЪдКЫаФФПБъгыЛЗОГДюНЈБОДЮВтЪдвдбщжЄ ZMC900E ЫЋТЗ EtherCAT жїеОЕФЙЄвЕМЖадФмЮЊКЫаФЃЌжиЕуВтЪджїеО 1 вд 8KHzЃЈ125usЃЉИпЦЕжмЦкЁЂжїеО 2 вдВЛЭЌжмЦкВЂаадЫааЪБЕФЮШЖЈадЁЂЪЕЪБадЁЂЪ§ОнЭъећадЃЌЭЌЪБбщжЄЫЋТЗжїеОГЄЪБМфСЌајЙЄзїЕФПЩППадЃЌвдМАзюДѓДгеОЙвдиФмСІЃЌШЗШЯЦфЪЧЗёТњзуЪ§ПиЛњДВЁЂЙЄвЕЛњЦїШЫЁЂздЖЏЛЏВњЯпЕШИпадФмПижЦГЁОАашЧѓЁЃВтЪдгВМўВЩгУ ZMC900E дЫЖЏПижЦЦїзїЮЊКЫаФЃЌДюХф 43 ЬЈЙЄвЕМЖ EtherCAT ДгеОЩшБИЃЈжїеО 1 Йвди 28 ЬЈЃЌКЌ DI/DO ЩшБИЁЂЫЩЯТ / ЛуДЈ / ЬЈДяЖрЦЗХЦЫХЗўЧ§ЖЏЦїЃЛжїеО 2 Йвди 15 ЬЈЃЌКЌёюКЯЦїЁЂБЖИЃ EL ЯЕСаФЃПщЁЂZIOC/ZDM ЯЕСа IO ЩшБИЃЉЃЌИЈвд EtherCAT зЈгУЗжЮівЧЁЂ24V ЙЄвЕЕчдДЁЂЙЄвЕМЖЭјЯпЕШИЈВФЃЛШэМўВуУцВЩгУ AWStudio ЩЯЮЛЛњЭъГЩ EtherCAT ЭјТчХфжУЁЂЪЕЪБМрПигыЪ§ОнВЩМЏЃЌNetAnalyzer ЗжЮівЧЪЕЯж PDO жЁЙ§ТЫЁЂЖЖЖЏЭГМЦгыбгЪБЗжЮіЃЌЭЌЪББраДЖЈжЦЛЏВтЪдГЬађЪЕЯжЫХЗў CSP ФЃЪНдЫЖЏПижЦЁЂDI/DO гВМўЖдНгЖСаДВтЪдЁЃ
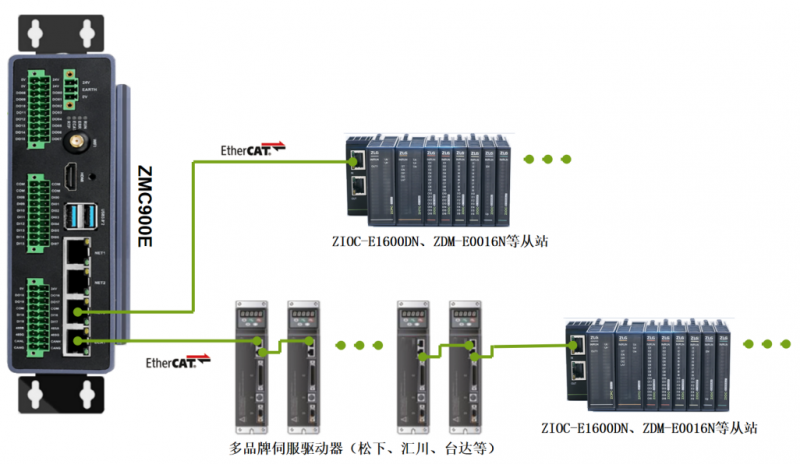
ВтЪдДюНЈБъзМЯпадЭиЦЫНсЙЙЃЌНЋ EtherCAT ЗжЮівЧНгШыСНТЗжїеО OUT ЖЫгыЪзИіДгеО IN ЖЫжЎМфЃЌЫљгаДгеОЭЈЙ§ЭјЯпМЖСЊЃЌПЊЦєжЇГжЗжВМЪНЪБжгЃЈDCЃЉЕФДгеОЭЌВНЙІФмЃЌХфжУ PDO Ъ§ОнНЛЛЅИёЪНЃЌШЗБЃВтЪдЛЗОГЬљКЯЙЄвЕЯжГЁЪЕМЪгІгУГЁОАЁЃ ЙиМќВтЪдЛЗНкгыадФмБэЯж1. зюаЁ PDO жмЦкЪЪХфЃКЩИбЁзюгХЮШЖЈдЫаазщКЯPDO жмЦкЪЧ EtherCAT ЪЕЪБадЕФКЫаФжИБъЃЌБОДЮВтЪдвРДЮЩшжУ125us+125usЁЂ125us+250usЁЂ125us+500usЁЂ125us+1msЫФжжЫЋТЗжїеОжмЦкзщКЯЃЌЭЈЙ§ЗжЮівЧМрПи PDO жЁЖЖЖЏгыЭЈаХЮШЖЈадЃЌНсЙћЯдЪОЃК
ЙиМќВтЪдЛЗНкгыадФмБэЯж1. зюаЁ PDO жмЦкЪЪХфЃКЩИбЁзюгХЮШЖЈдЫаазщКЯPDO жмЦкЪЧ EtherCAT ЪЕЪБадЕФКЫаФжИБъЃЌБОДЮВтЪдвРДЮЩшжУ125us+125usЁЂ125us+250usЁЂ125us+500usЁЂ125us+1msЫФжжЫЋТЗжїеОжмЦкзщКЯЃЌЭЈЙ§ЗжЮівЧМрПи PDO жЁЖЖЖЏгыЭЈаХЮШЖЈадЃЌНсЙћЯдЪОЃК
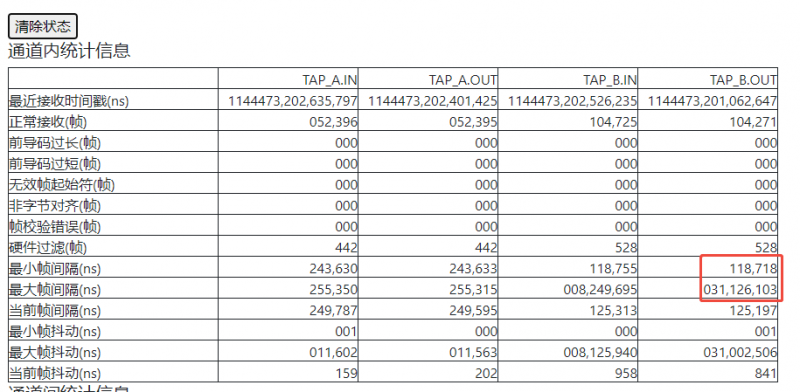
- 125us+125usЁЂ125us+250us зщКЯЯТЃЌЫЋТЗжїеОПьЫйГіЯж PDO жЁДѓЗљЖЖЖЏЃЌзюДѓЖЖЖЏДяЪ§ЪЎКСУыЃЌЭЈаХжмЦкЛьТвЃЌЮоЗЈЮШЖЈдЫааЃЛ
- 125us+500us зщКЯЧАЦкЖЖЖЏНЯаЁЃЌЕЋВтЪдГЌ 1 аЁЪБКѓГіЯжЭЛЗЂДѓЖЖЖЏЃЌЮоЗЈТњзуГЄЦкСЌајдЫааашЧѓЃЛ
- 125us+1msзщКЯЯТЃЌВтЪдШЋГЬ 48 аЁЪБФк PDO жЁЖЖЖЏЮШЖЈЃЌДгеОЩшБИПижЦЮовьГЃЃЌЮЊжїеОзюгХЮШЖЈдЫаажмЦкХфжУЃЌКѓајЫљгаКЫаФадФмВтЪдОљЛљгкДЫзщКЯПЊеЙЁЃ
ЫЋжїеО125usжмЦкЯТ,бИЫйГіЯжPDOжЁжмЦкЖЖЖЏДѓ,ЭЈаХжмЦкЛьТвЃЌШчЯТБэЫљЪОЁЃ
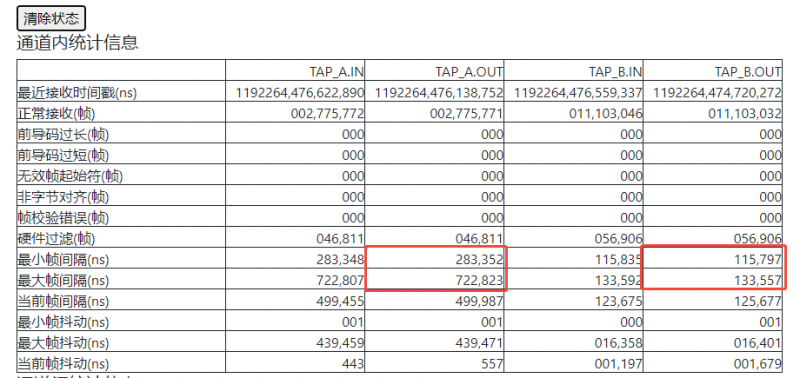
Master1 125usжмЦкЃЌMaster2 250usжмЦкЯТ,ЭЌЪБбИЫйГіЯжPDOжЁжмЦкЖЖЖЏДѓ,ЭЈаХжмЦкЛьТвЃЌШчЯТБэЫљЪОЁЃ
Master1 125usжмЦкЃЌMaster2 500usжмЦкЯТ,ЧАЦкЖЖЖЏНЯаЁЃЌВтЪдГЌ1аЁЪБКѓГіЯжДѓЖЖЖЏЃЌШчЯТБэЫљЪОЁЃ
Master1 125usжмЦкЃЌMaster2 1msжмЦкЯТ,ВтЪдЪБГЄ48аЁЪБЃЌPDOжЁЖЖЖЏЮШЖЈЃЌДгеОПижЦе§ГЃЃЌШчЯТБэ6ЫљЪОЁЃ
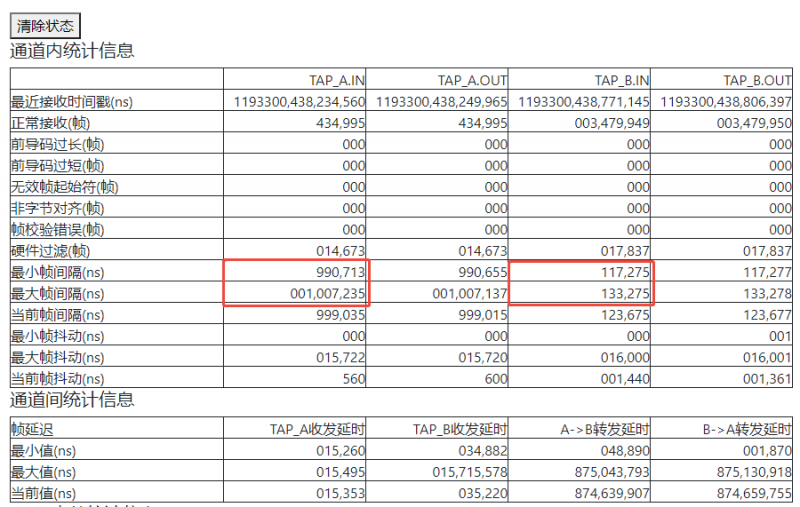
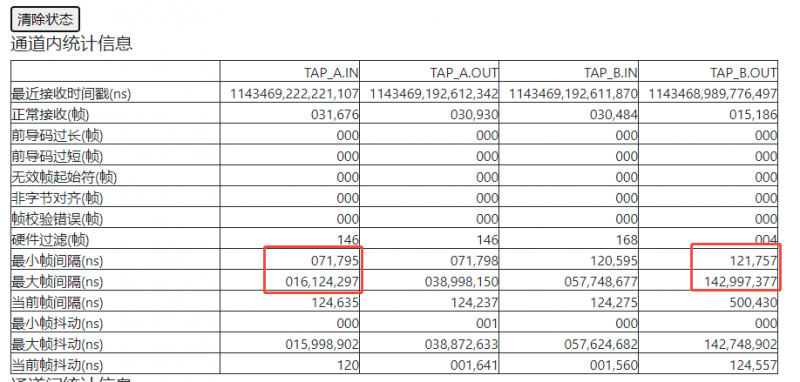
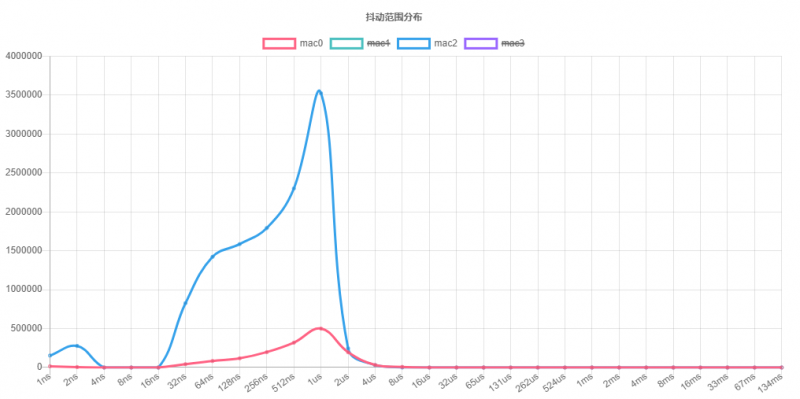
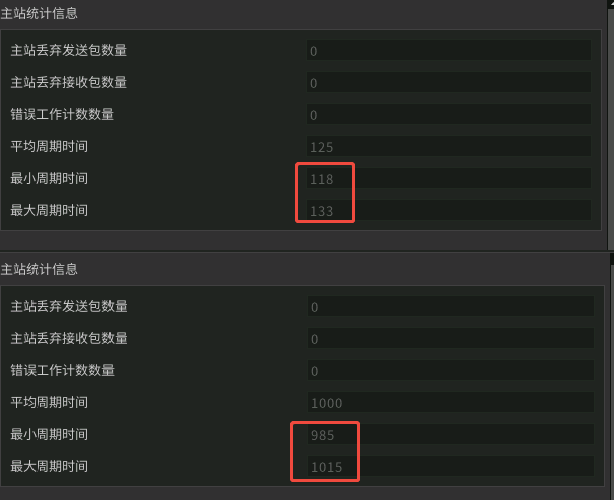
2. КЫаФадФмВтЪдЃКШЋЮЌЖШбщжЄЙЄвЕМЖПЩППадвджїеО 1ЃЈ125us/8KHzЃЉЁЂжїеО 2ЃЈ1msЃЉЮЊЛљзМЃЌПЊеЙ 48 аЁЪБСЌајЮШЖЈадВтЪдЃЌДгЪ§ОнЭъећадЁЂЪЕЪБадЁЂЩшБИПижЦгааЇадЁЂЭЈаХзДЬЌЁЂCPU зЪдДеМгУЮхИіЮЌЖШЭъГЩШЋЮЌЖШбщжЄЃЌКЫаФБэЯжШчЯТЃК2.1 Ъ§ОнЭъећадЃКСуЖЊАќСуДэАќЃЌжИСюДЋЪфОјЖдПЩППВтЪдШЋГЬЭЈЙ§ЩЯЮЛЛњЭГМЦЪеЗЂАќЪ§СПЃЌЫЋТЗжїеОЖЊАќТЪОљЮЊ 0.00%ЃЈЩЯЮЛЛњЯдЪОЕФ 1 ИіЖЊАќЮЊЪ§ОнЯдЪОбгГйЃЌЗЧЪЕМЪЖЊАќЃЉЃЌЮоШЮКЮжЁаЃбщДэЮѓЁЂЗЧзжНкЖдЦыЕШЭЈаХвьГЃЃЌжїеО 1 ИКдиТЪ 22.99%ЁЂжїеО 2 ИКдиТЪ 1.21%ЃЌДјПэгрСПГфзуЃЌЭъШЋБЃеЯЙЄвЕЯжГЁПижЦжИСюгыВЩМЏЪ§ОнЕФПЩППДЋЪфЁЃ2.2 ЪЕЪБадЃКЮЂУыМЖЖЖЖЏЃЌТњзуИпОЋЖШЖржсЭЌВНПижЦЪЕЪБадЪЧдЫЖЏПижЦЕФЙиМќЃЌБОДЮВтЪджиЕуЙизЂ PDO жЁЗЂЫЭжмЦкЖЖЖЏгыгІгУЛиЕїКЏЪ§жмЦкЖЖЖЏСНДѓКЫаФжИБъЃЌЪЕВтЪ§ОнОљДяЕНЙЄвЕМЖИпОЋЖШБъзМЃК
- PDO жЁЖЖЖЏЃКжїеО 1 зюаЁжЁМфИє 117.275usЁЂзюДѓ 133.275usЃЌЖЖЖЏЗЖЮЇ ±8.275usЃЌЖрЪ§ЖЖЖЏЗжВМдк 16ns~2us ЧјМфЃЛжїеО 2 зюаЁжЁМфИє 990.713usЁЂзюДѓ 1007.235usЃЌЖЖЖЏЗЖЮЇ ±9.287usЃЌЖрЪ§ЖЖЖЏЗжВМдк 32ns~4us ЧјМфЃЌЮЂУыМЖЖЖЖЏШЗБЃжЁДЋЪфЕФИпвЛжТадЃЛ
- ЛиЕїКЏЪ§ЖЖЖЏЃКжїеО 1 ЦНОљжмЦк 125usЃЌЖЖЖЏЗЖЮЇ ±8usЃЛжїеО 2 ЦНОљжмЦк 1msЃЌЖЖЖЏЗЖЮЇ ±15usЃЌЮШЖЈЕФЛиЕїжмЦкЮЊИпОЋЖШЙьМЃЙцЛЎЁЂЖржсЭЌВНдЫЖЏЬсЙЉКЫаФБЃеЯЁЃ
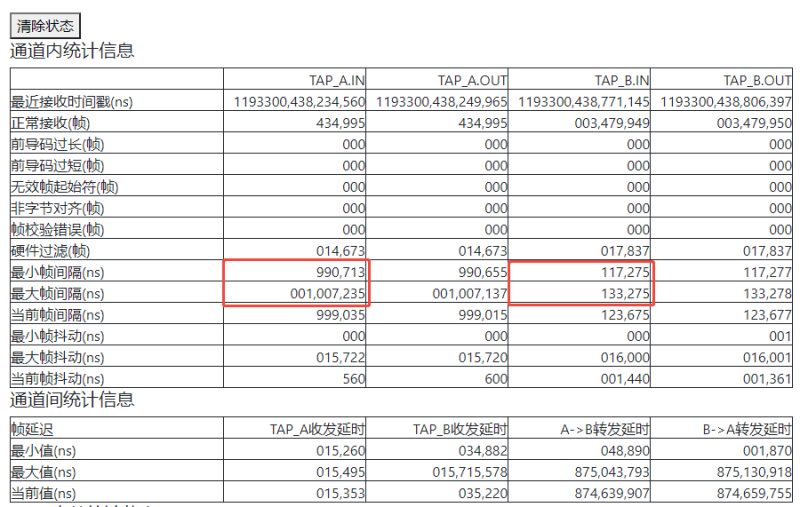
МЧТМЗжЮівЧжЁЗЂЫЭжмЦкЕФЖЖЖЏЗжВМЧщПіЃЌжїеО1ДѓЖрЪ§ЖЖЖЏЗжВМдк [16ns, 2us] ЧјМфЃЌжїеО2жївЊЗжВМдк[32ns, 4us] ЧјМфЃЌШчЯТЭМЫљЪОЁЃ
2.3 ЩшБИПижЦЃКЫХЗўгы IO ОЋзМЯьгІЃЌЮовьГЃБЈДэ
ЩшБИПижЦгааЇаджБНгЗДгГПижЦЦїЕФЪЕМЪгІгУФмСІЃЌВтЪджаЃК
-
ЫХЗўЩшБИЃКжїеО 1 ЫљДј 7 ЬЈЫХЗўЧ§ЖЏЦїдк CSP ФЃЪНЯТЃЌАДдЄЖЈФПБъЮЛжУЃЈ±50000000ЃЉМАЫйЖШдШЫйЭљЗЕдЫЖЏЃЌЮоШЮКЮДэЮѓТыЃЌЪЕМЪЮЛжУгыФПБъЮЛжУЦЋВюМЋаЁЃЌдЫЖЏПижЦОЋзМСїГЉЃЛ
-
IO ЩшБИЃКжїеО 2DI/DO гВМўЖдНгВтЪджаЃЌПижЦ DO ЩшБИ 4 ТЗЪфГіЮЊИпЃЌЖдгІ DI ЩшБИЧА 4 ТЗЪфШыЭЌВНжУЮЛЃЌЖСаДЯьгІЮобгГйЃЌЪ§ОнНЛЛЅвЛжТад 100%ЁЃ
2.4 ЭЈаХзДЬЌЃКШЋГЬЮовьГЃЃЌавщеЛдЫааЮШЖЈ
ЭЈаХВтЪдЙ§ГЬжаЃЌжїеОгыДгеОЕФЭЈаХзДЬЌОље§ГЃЃЌЧвБЃГждкВйзїзДЬЌЃЛAL МФДцЦїгы DL МФДцЦїзДЬЌОље§ГЃЃЌСНТЗжїеОЕФEtherCAT ЭЈаХзДЬЌОпЬхШчЯТЭМЫљЪОЁЃ

ЭМ10 EtherCATЭЈаХзДЬЌЧщПі
ЭЌЪБВтЪдЙ§ГЬжаСНТЗжїеООљУЛгаВњЩњШЮКЮДэЮѓШежОЃЌжїеОавщеЛдЫааНде§ГЃЃЌШчЯТЭМЫљЪОЁЃ
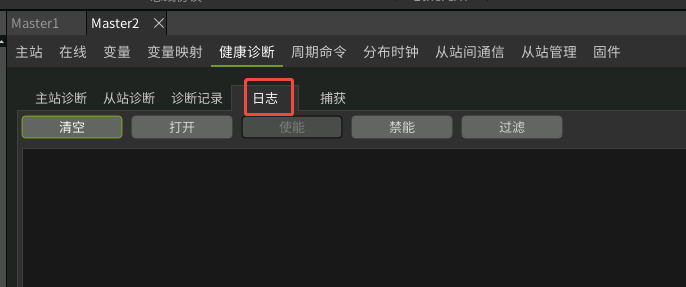
48 аЁЪБВтЪджаЃЌЫЋТЗжїеОМАЫљга 43 ЬЈДгеООљБЃГже§ГЃВйзїзДЬЌЃЌAL/DL МФДцЦїзДЬЌЮоШЮКЮвьГЃЃЌЮДВњЩњвЛЬѕ EtherCAT ДэЮѓШежОЃЌжїДгеОЭЈаХЮожаЖЯЁЂЮоПЈЖйЃЌавщеЛдЫааЮШЖЈПЩППЃЌГфЗжбщжЄСЫ ZMC900E EtherCAT авщЪЕЯжЕФГЩЪьЖШЁЃ
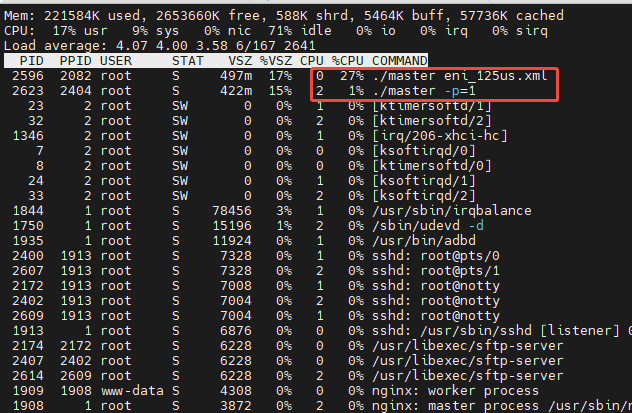
2.5 зЪдДеМгУЃКCPU ИКдиЕЭЃЌдЄСєГфзуПЊЗЂгрСП
ПижЦЦїЯЕЭГзЪдДеМгУжБНггАЯьЖўДЮПЊЗЂгыЖрШЮЮёдЫааФмСІЃЌЫЋТЗжїеОавщеЛВЂаадЫааКѓЃЌЭЈЙ§ top ЙЄОпМрПиЯдЪОЃКжїеО 1ЃЈ125us ИпЦЕЃЉCPU ЪЙгУТЪНі 27%ЃЌжїеО 2ЃЈ1msЃЉCPU ЪЙгУТЪНі 1%ЃЌзмЪЙгУТЪВЛзу 30%ЃЌдЄСєДѓСПЯЕЭГзЪдДПЩЙЉгУЛЇЖўДЮПЊЗЂЁЂЖрвЕЮёГЬађдЫааЃЌЮоЯЕЭГПЈЖйЗчЯеЁЃ
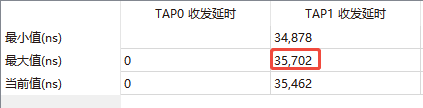
3. зюДѓДгеОЪ§ЭЦЫуЃКИпРЉеЙадТњзуИДдгЭиЦЫашЧѓ
дкЙЄвЕЯжГЁЃЌПижЦЦїЕФДгеОЙвдиФмСІОіЖЈСЫЯЕЭГЕФЭиЦЫСщЛюадЃЌБОДЮВтЪдЛљгк 125us ИпЦЕжмЦкЯТЕФЪЕВтЪ§ОнЃЌНсКЯАйезвдЬЋЭјДЋЪфЬиадЃЌЭъГЩзюДѓДгеОЪ§ЭЦЫуЃКЪЕВт 28 ИіДгеОЯТЃЌЪ§ОнжЁРДЛизЊЗЂбгЪБ 35.702usЃЌЦНОљЕЅДгеОзЊЗЂбгЪБ 1.3usЃЛАйезвдЬЋЭј 1Byte Ъ§ОнДЋЪфКФЪБдМ 80nsЃЌАД PDO жмЦк 80% ЮЊгааЇДјПэЃЈдЄСє 20% ДІРэгЪЯфЁЂМФДцЦїЕШжЁЃЉМЦЫуЃЌЕБЫљгаДгеОзм PDO Ъ§ОнЮЊ 500 зжНкЪБЃЌ125us жмЦкЯТжїеОзюДѓПЩЙвди 46 ИіДгеОЁЃ
 ВтЪдНсТлгыЙЄГЬгІгУМлжЕБОДЮеыЖд ZMC900E дЫЖЏПижЦЦї EtherCAT ЫЋТЗжїеОЕФ 48 аЁЪБШЋЮЌЖШадФмВтЪдЃЌбщжЄСЫЦфдкИпЦЕЭЈаХЁЂЖрДгеОЙвдиЁЂГЄЪБМфСЌајдЫааГЁОАЯТЕФгХвьБэЯжЃЌКЫаФНсТлШчЯТЃК
ВтЪдНсТлгыЙЄГЬгІгУМлжЕБОДЮеыЖд ZMC900E дЫЖЏПижЦЦї EtherCAT ЫЋТЗжїеОЕФ 48 аЁЪБШЋЮЌЖШадФмВтЪдЃЌбщжЄСЫЦфдкИпЦЕЭЈаХЁЂЖрДгеОЙвдиЁЂГЄЪБМфСЌајдЫааГЁОАЯТЕФгХвьБэЯжЃЌКЫаФНсТлШчЯТЃК
- жмЦкЪЪХфадгХвьЃКЫЋТЗжїеОдк 125us+1ms жмЦкзщКЯЯТПЩЪЕЯжГЄЦкЮШЖЈдЫааЃЌжїеО 1 жЇГж 8KHz ИпЦЕЭЈаХЃЌТњзуИпОЋЖШдЫЖЏПижЦЕФЪЕЪБадашЧѓЃЌжїеО 2 ЪЪХфГЃЙцПижЦГЁОАЃЌМцЙЫИпЦЕгыГЃЙцГЁОАЕФЗжЧјПижЦЃЛ
- ЪЕЪБадгыПЩППадЫЋИпЃКЫЋТЗжїеО PDO жЁгыЛиЕїКЏЪ§ОљЪЕЯжЮЂУыМЖЖЖЖЏЃЌШЋГЬСуЖЊАќСуДэАќЃЌжїДгеОЭЈаХЮовьГЃЃЌЫХЗўгы IO ЩшБИПижЦОЋзМЃЌЭъШЋТњзуЙЄвЕздЖЏЛЏСьгђИпадФмЁЂИпПЩППЕФПижЦашЧѓЃЛ
- зЪдДеМгУКЯРэЃЌРЉеЙадЧПЃКCPU ИКдиТЪЕЭЃЌдЄСєГфзуЖўДЮПЊЗЂгрСПЃЌ125us ИпЦЕжмЦкЯТзюДѓПЩЙвди 46 Иі 500 зжНк PDO Ъ§ОнЕФДгеОЃЌЭиЦЫЩшМЦСщЛюЃЌЪЪХфИДдгЙЄвЕЯжГЁЕФЖрЩшБИзщЭјашЧѓЃЛ
- ЖрЦЗХЦМцШнадКУЃКВтЪдМцШнЫЩЯТЁЂЛуДЈЁЂЬЈДяЕШЖрЦЗХЦЫХЗўЧ§ЖЏЦїЃЌвдМАБЖИЃЁЂZIOC/ZDM ЕШЖрЯЕСа IO ЩшБИЁЂёюКЯЦїЃЌавщМцШнадЧПЃЌНЕЕЭЙЄГЬЯжГЁЕФЩшБИбЁаЭгызщЭјФбЖШЁЃ
ДгЙЄГЬгІгУНЧЖШРДПДЃЌZMC900E дЫЖЏПижЦЦїЕФ EtherCAT ЫЋТЗжїеОЩшМЦЃЌМШТњзуСЫЪ§ПиЛњДВЁЂЙЄвЕЛњЦїШЫЕШЩшБИЕФИпОЋЖШЖржсЭЌВНПижЦашЧѓЃЌгжФмЪЕЯжздЖЏЛЏВњЯпЕФЗжЧјЖРСЂПижЦЃЌЦфгХвьЕФЪЕЪБадЁЂПЩППадгыРЉеЙадЃЌЪЙЦфГЩЮЊЙЄвЕздЖЏЛЏСьгђжаИДдгдЫЖЏПижЦГЁОАЕФРэЯыбЁдёЁЃЮоТлЪЧИпЦЕТЪЕФОЋУмдЫЖЏПижЦЃЌЛЙЪЧЖрЩшБИЕФЗжВМЪНзщЭјЃЌZMC900E ЖМФмЬсЙЉЮШЖЈЁЂИпаЇЕФ EtherCAT змЯпЭЈаХжЇГХЃЌЮЊжЧФмжЦдьЕФТфЕиЪЕЪЉЬсЙЉКЫаФгВМўБЃеЯЁЃ ММЪѕзмНсEtherCAT змЯпЕФадФмБэЯжЪЧдЫЖЏПижЦЦїЕФКЫаФОКељСІЃЌЖјЫЋТЗжїеОЕФЩшМЦИќЪЧЖдПижЦЦїавщЪЕЯжЁЂгВМўзЪдДЁЂЯЕЭГгХЛЏЕФзлКЯПМбщЁЃZMC900E дЫЖЏПижЦЦїЭЈЙ§ГЩЪьЕФ EtherCAT авщеЛЩшМЦЁЂКЯРэЕФгВМўзЪдДЗжХфЁЂИпаЇЕФЯЕЭГгХЛЏЃЌЪЕЯжСЫЫЋТЗжїеОЕФИпЦЕЮШЖЈдЫааЁЂЮЂУыМЖЪЕЪБЖЖЖЏгыИпШнСПДгеОЙвдиЃЌЦфЪЕВтадФмДяЕНЙЄвЕМЖИпБъзМЁЃдкжЧФмжЦдьЯђОЋЯИЛЏЁЂШсадЛЏЗЂеЙЕФЧїЪЦЯТЃЌZMC900E EtherCAT ЫЋТЗжїеОЕФИпадФмБэЯжЃЌВЛНіЮЊЩшБИжЦдьЩЬЬсЙЉСЫИпПЩППЕФПижЦгВМўбЁдёЃЌвВЮЊЯЕЭГМЏГЩЩЬЬсЙЉСЫСщЛюЕФзщЭјЗНАИЃЌжњСІЙЄвЕздЖЏЛЏВњЯпЪЕЯжИќИпОЋЖШЁЂИќИпаЇТЪЁЂИќЮШЖЈЕФдЫааЃЌЭЦЖЏжЧФмжЦдьММЪѕЕФТфЕигыЩ§МЖЁЃ
ММЪѕзмНсEtherCAT змЯпЕФадФмБэЯжЪЧдЫЖЏПижЦЦїЕФКЫаФОКељСІЃЌЖјЫЋТЗжїеОЕФЩшМЦИќЪЧЖдПижЦЦїавщЪЕЯжЁЂгВМўзЪдДЁЂЯЕЭГгХЛЏЕФзлКЯПМбщЁЃZMC900E дЫЖЏПижЦЦїЭЈЙ§ГЩЪьЕФ EtherCAT авщеЛЩшМЦЁЂКЯРэЕФгВМўзЪдДЗжХфЁЂИпаЇЕФЯЕЭГгХЛЏЃЌЪЕЯжСЫЫЋТЗжїеОЕФИпЦЕЮШЖЈдЫааЁЂЮЂУыМЖЪЕЪБЖЖЖЏгыИпШнСПДгеОЙвдиЃЌЦфЪЕВтадФмДяЕНЙЄвЕМЖИпБъзМЁЃдкжЧФмжЦдьЯђОЋЯИЛЏЁЂШсадЛЏЗЂеЙЕФЧїЪЦЯТЃЌZMC900E EtherCAT ЫЋТЗжїеОЕФИпадФмБэЯжЃЌВЛНіЮЊЩшБИжЦдьЩЬЬсЙЉСЫИпПЩППЕФПижЦгВМўбЁдёЃЌвВЮЊЯЕЭГМЏГЩЩЬЬсЙЉСЫСщЛюЕФзщЭјЗНАИЃЌжњСІЙЄвЕздЖЏЛЏВњЯпЪЕЯжИќИпОЋЖШЁЂИќИпаЇТЪЁЂИќЮШЖЈЕФдЫааЃЌЭЦЖЏжЧФмжЦдьММЪѕЕФТфЕигыЩ§МЖЁЃ