公司内部的物料流自动化程度越来越高,自动运输车辆在仓库和生产中也越来越流行。自动运输车进一步发展的核心主题是 3D 环境检测和车辆之间的合作。除了技术发展外,还必须考虑经济效率。
自动运输车不再仅用于仓库,大家还可以在生产供应中找到它们的身影。生产供应对 AGV 的要求与在仓库中的要求非常相似,这两个领域相互助力。产品通过仓库供应,但是仓库会因生产而被填满。自动化运输已进入这两个领域,自动化必须一次又一次地适应动态环境。对于 AGV 来说也是如此。
无论是工业机器人还是自动驾驶汽车,只要没有人直接负责或控制方向盘,就必须优先考虑安全性。用于生产车辆的经典安全系统是 2D 激光扫描仪,它的传感器会在其前面生成一个保护区,当扫描仪在其保护区内定位到物体,就会触发警报或直接停止车辆前行。通过其中几个传感器,可以在车辆周围创建一个 360°的保护区。然而,工厂中的许多障碍物都延伸到了地面上,需要把它们视为一个整体才能避开。如果障碍物是移动的,需要等其离开车辆的驾驶区域。
导航和安全需要 3D 视角
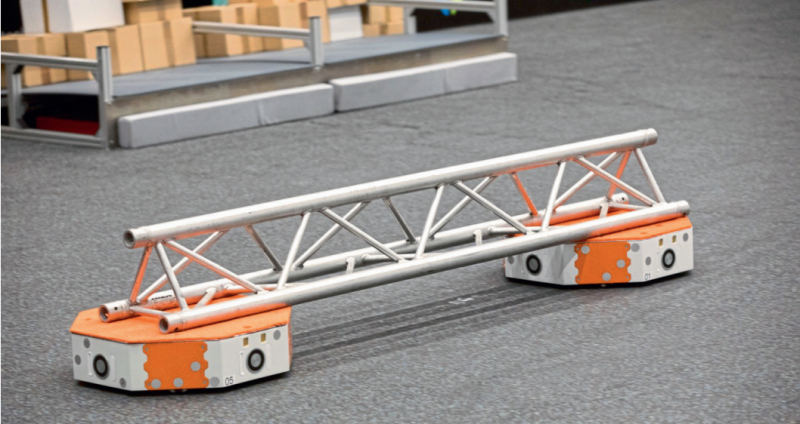
2D 激光扫描仪在给定区域创建一个平坦的“安全区”
弗劳恩霍夫物流研究所(IML)的Thomas Albrecht 指出了一个可能存在的问题 :“想象一根杆伸入车辆的驾驶空间,通过光传感器的扫描范围后停止进一步深入。如果车辆接触到杆,最初可能只会造成财产损失。但是如果杆移动并撞到另一端的人,很快就会造成人身伤害。”如果考虑到大多数产品都是可用于任何类型车辆的,那么可靠的安全系统是绝对必要的。3D 导航是下一步,这不仅仅是关于四周环境的 3D 地图。相反,机器人应该识别其环境中的内容,并能够尽可能多地鉴别它们。
自动运输车辆目前基于其行驶的工作环境的数字地图,或者通过扫描分布在公司场所的反射器来导航,两种方法各有优缺点。数字地图更具有灵活性,它们可以快速调整程序。通过反射器导航则更精确,因为它使用了固定且可明确分配的锚点。此外,企业不必为这种类型的寻路安装任何反射器。
但是,这两种方法都不能实时工作和用于真正自主导航。如果 AGV 能够独立识别它们所在的位置并开创性地寻找路线,那么自主移动机器人 AMR 这个术语确实是名副其实的。人工智能对此有所帮助,以这种方式学习和适应的机器人也可以独立应对动态环境。
用人工智能实现真正的自主行动
通过像 Gideon Bros. 这样 AI 支持的图像处理
运输机器人可以越来越好地识别所处的环境
人工智能变得越可靠和越强大,导航和安全系统就会变得越好。也许有一天,运输机器人会能够完全独立、平稳地在工厂中蜿蜒穿行。
谈到智能,人们还应该研究群体智能。AMR 不仅可以自己定位,还可以一起寻找路径。目前,AGV 通常由中央控制单元监控,通知单个车辆在哪里需要它以及任务是什么。
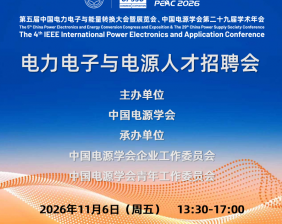
将来,AGV 或许也可以在它们之间相互解决问题。AMR 可以不断地相互交流和协调。随后,订单将发送到所有运输单元。当前空闲的单元将被接管。这些车辆还可以合作并共同处理运输订单。例如,在运输大件货物的情况下,多个机器人可以协调并一起拾取货物。
追求性价比
为了让 AGV 市场持续增长,这些车辆必须是大家能够负担得起的。每个人都应该可以使用 3D 相机、人工智能和分散控制,包括大型企业、中型公司和初创企业。因此,模块化也是进一步开发 AGV 时的重要标准。
“未来 AGV能够完成更多的任务,这意味着单个车辆必须能够做得更多。”汉诺威综合生产研究所(IPH)的 Marvin Abt 说。在机器人开始工作之前,必须进行的设置环节可以由用户来执行。设备维护与此情况类似。如果设备出现故障,生产可能会中断。即使外部技术人员当天赶来,也会浪费宝贵的时间。如果员工可以自己进行调试、服务和基本维修,便可以节省时间和金钱。
“开箱即用”的 AMR 将是中小企业将其生产供应升级到最先进水平的一种选择。