


多关节机器人定义为臂部有多个转动关节的机器人,一般由立柱和大小臂组成,其轴数(关节)越多,自由度越高,超过6轴为冗余自由度,其中以 4-6 轴最常见。具体来看,多关节机器人主要有两个特点:一是负载范围大,从不足1KG到2-3吨不等,能够满足多种任务的负载要求;二是作业范围大,可以适合于几乎任何轨迹或角度的工作。
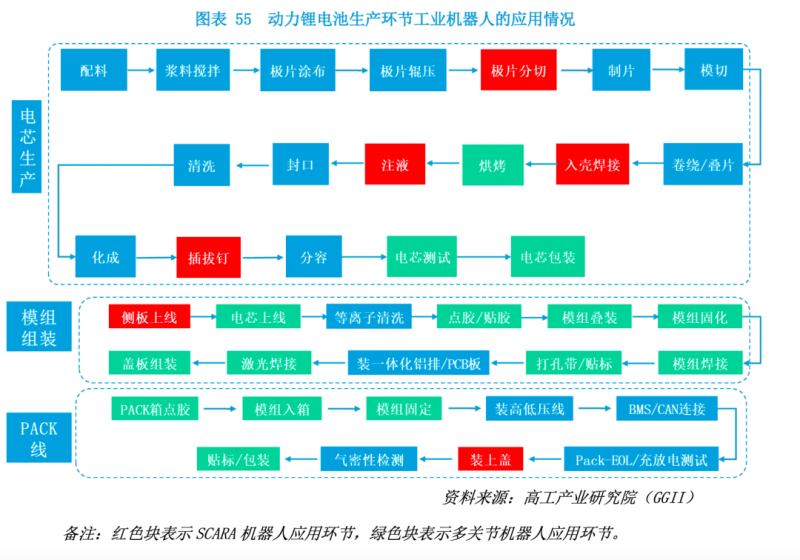
目前而言,多关节机器人在锂电池生产环节中涉足的工序主要集中在中后段工序中,以模组、 PACK环节用量最大,包含搬运、上下料、涂胶、堆叠、焊接、分拣、清洗、入箱、锁紧、测试、包装等环节。
从应用场景来看,动力锂电池领域是多关节机器人在锂电行业应用的“高地”,已在电芯上下料、电芯分选、电芯焊接、电芯烘烤、电芯组装、模块检测、模块组装、模块紧固等具体的应用工序落地,而在数码锂电池领域,由于电池产品种类多,需要频繁换型,SCARA 使用量比较大,部分场景也开始导入协作机器人,多关节机器人使用较少。
具体来看,多家企业均有针对锂电行业推出相应的多关节机器人产品。
如埃斯顿针对锂电池行业定制化开发 70kg 负载机器人ER70B-2100-LI,该产品负重 70kg,臂展2100mm,重复定位精度±0.08mm,一次可抓取 2-4 个电芯,配合视觉进行翻转和旋转,实现电极配对排列。
如汇川技术推出的IR-R60六轴机器,其可完成多工位、大范围、重负载、大惯量产品搬运,设备运行平稳,同时采用EtherCAT 通讯,一网到底,XML文件配置简便,2~4ms即可完成一次交互, 通讯效率及稳定性高,此外,可适应落地、地轨等多种安装形式,可满足锂电不同环节的应用需求。
从入局企业来看,目前锂电行业应用的多关节机器人多为外资品牌机器人为主,国产品牌中仅有埃斯顿、汇川技术、埃夫特、配天机器人、华数机器人、图灵机器人等少数多关节机器人企业几家入局(根据各家企业官方宣传口径统计)。
纵然目前的入国产企业较少,但在可看见的未来,仍在持续扩张的锂电行业已然是多关节机器人争抢的“蓝海”之一。
从具体的趋势来看,未来几年,锂电行业应用的多关节机器人或将呈现如下特点:
1.机器人要实现可重构可重复利用:除了关注传统的质量、成本、柔性和效率之外,要对市场的反应速度,抗各种干扰的能力,以及可重构可重复利用的能力要极大提升;
2.具备自感知、自适应:机器人需要具有自我感知、自我适应、自我补偿,以及对生产环境的自我调整的能力;
3.高稳定、高可靠性:在锂电行业中,停产与故障是非常敏感的,因此多关节机器人不仅要具备高稳定、高可靠性,同时要能够实现预测性的自动问题追溯,以及达到零缺陷、零故障的能力;
4.行业定制化:根据电池生产工艺定制专属机器人,针对锂电行业中多关节机器人还未渗透的工序,开发专用工业机器人。
5.高性价比:锂电产业链成本压力大,自动化生产线一次投入较大,机器人性价比是锂电行业考虑的关键点。













