


说到医用机器人,人们比较容易想到能帮助医生做手术的“达芬奇”,它确实是目前全球最为成功的一款手术机器人。据统计截至今年3月,全球安装了6142台,截止今年6月底,国内安装了232台。今年上半年达芬奇在国内完成了4万多例手术,估计今年全年可完成10万例手术。
医用机器人产业规模

国内医用机器人的情况
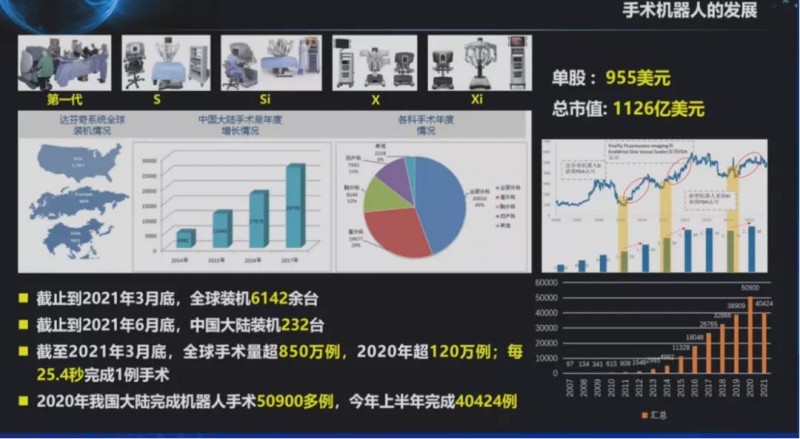
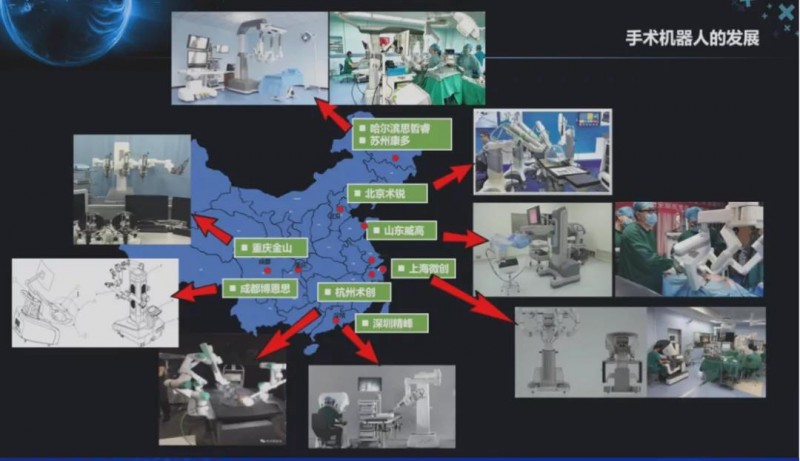
图:国内手术机器人主要供应商

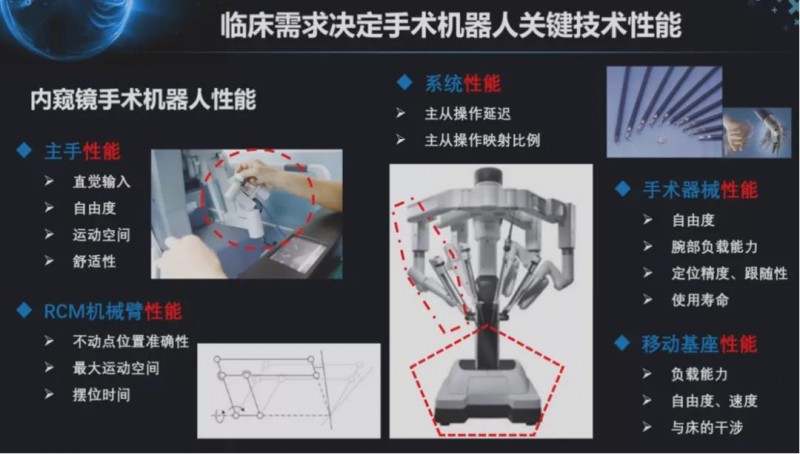
图:杜志江教授团队开发的腹腔镜手术机器人
国内医用机器人遇到的问题
医用机器人产业规模
国内医用机器人的情况
国内医用机器人遇到的问题
下一篇:5G新规出台, 三大运营商的基站建设速度能跟上吗?
本文仅代表作者个人观点,与中自网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容!来源网络如有误有侵权则删。













