工艺介绍
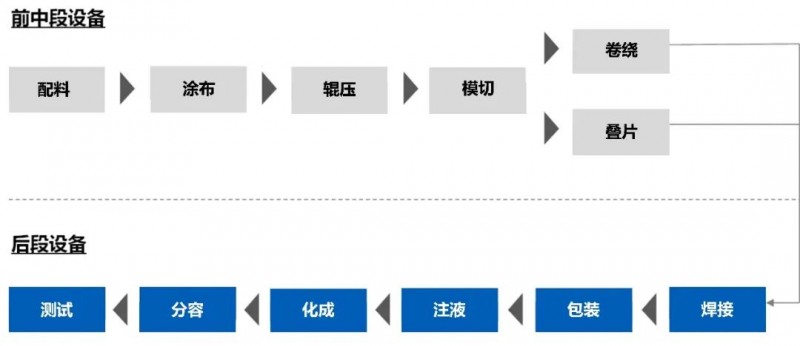
在二次电池的中段工艺中,电池焊接机首先需要将卷绕/叠片之后的电芯进行快速热压,以实现电芯的压实,然后对电芯的正负极耳进行超声波焊接。
1. 压力波动大,造成包裹不良或注液不足
目前,压力波动控制在10%左右,造成电芯厚度偏差较大,当电芯实际厚度比要求大时,在后续的包装处会出现包裹不良;当电芯厚度比要求薄时,电芯则会在注液处出现电解液注液不足。
2. 设备安全防护等级不达标,存在安全隐患
为了给员工创造一个更安全的工作环境(根据OSHA要求),避免事故发生,且以更高地安全标准投放欧盟市场,需对设备实施有效的安全防护措施,使设备安全防护等级达到D级。
解决方案
1. 通过PID优化,有效控制压力波动
常规PID容易出现超调或稳定时间过长等现象,因此,需要针对现有PID进行优化。

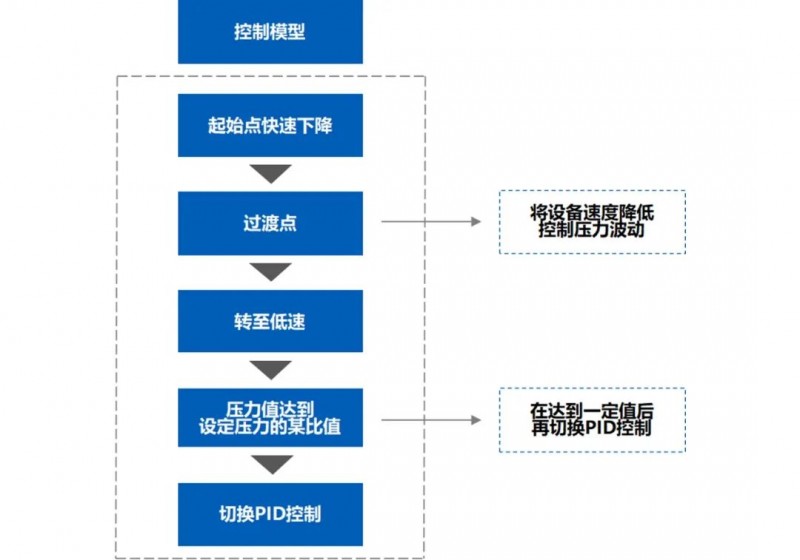
优化后的PID闭环控制模型:
在过渡点,将设备速度降低,以控制压力波动,不让压力变化过大;在到达一定压力值后,再切换PID控制,实现压力波动≤5%,且稳定时间更短。
2. 根据4个步骤,针对性地制定安全防护对策
安全防护主要分为4个步骤:
-
风险识别
-
风险评估
-
安全防护对策
-
PL等级评定。
首先,焊接机的风险识别主要有以下几个方面:
-
热压工位处的热压伺服:
热压下压时有可能挤压到人;
-
焊机工位处,焊机焊接时有触点风险;
-
人员意外进入设备内可能引起冲撞;
-
机器人取放料时可能挤压到人;
-
转盘工位处,转盘运动时有碰撞人员的风险;
其次,风险评估,为了解决机器人的风险点,基于ISO13849-1(GB/T16855.1)的评定表如下图所示:

第三,安全防护对策,主要以3个方面来实施:
-
安全冗余回路设计:
采用双通道输入/输出构成冗余回路,提高硬件回路Category等级
-
提高MTTFd值:
根据设备运转实际情况,采用B10d相符的元件;
-
提升诊断覆盖率:
合理检查,使用常开闭的机械触点,使用动态测试。
最后,PL等级评定,根据焊接机的安全设计方案进行安全等级的计算(IS013849-1:2006风险计算标准),以最低安全回路(单个安全功能)的等级评定为例。
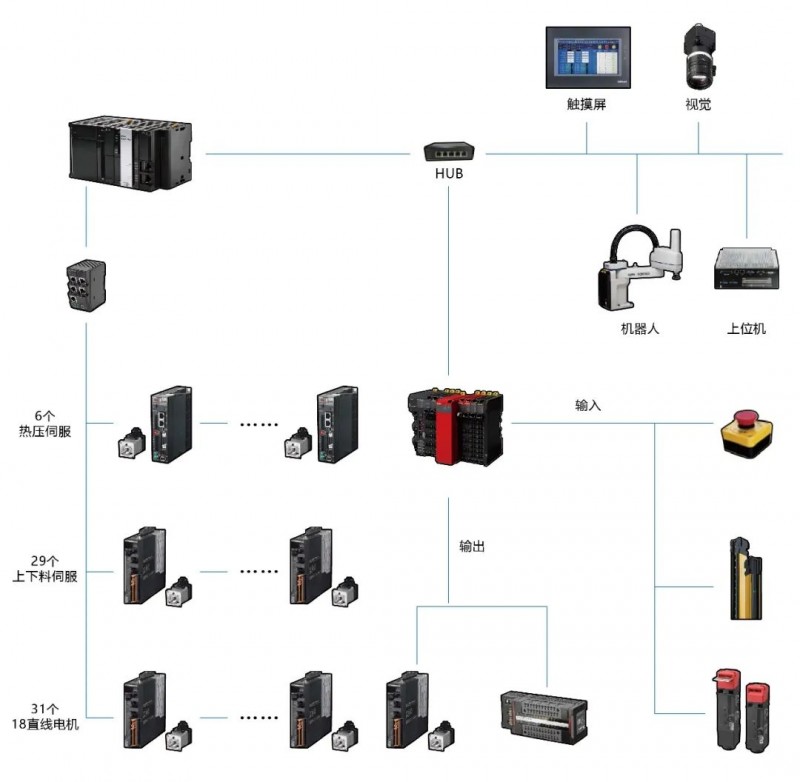
控制系统
机械自动化控制器 NJ / NX系列
AC伺服系统 1S系列
安全控制单元 NX系列
图像处理系统 FH系统
SCARA机器人 Cobra 450/650系列
安全光幕 F3SG-SR/PG 系列