ЁЁЁЁДЌВАдкКНаажавђЗчРЫЕШЭтСІзїгУВњЩњКсвЁЁЂзнвЁЃЌЮЃМАЮШЖЈгыЪцЪЪЁЃМѕвЁїЂзїЮЊГЃМћзАжУЃЌЭЈЙ§жїЖЏПижЦїЂЦЌВњЩњЗДЯђСІОивдвжжЦКсвЁЁЃ
ЁЁЁЁДЋЭГМѕвЁїЂПижЦЯЕЭГвРРЕФЃФтЕчТЗЛђзЈгУПижЦЦїЃЌДцдкЯЕЭГИДдгЁЂЮЌЛЄРЇФбЁЂРЉеЙадВюЕШЙЬгаШБЕуЁЃЫцзХММЪѕЗЂеЙЃЌПЩБрГЬТпМПижЦЦїЃЈPLCЃЉЦОНшЦфИпПЩППадЁЂБрГЬСщЛюадМАвзгкРЉеЙЕФгХЪЦЃЌвбГЩЮЊИУСьгђЙуЗКгІгУЕФаТаЭНтОіЗНАИЁЃ
ЁЁЁЁ01ЛљгкPLCЕФМѕвЁїЂПижЦЯЕЭГзщГЩ
ЁЁЁЁДЋИаЦї
ЁЁЁЁгУгкВЩМЏДЌВАКсвЁНЧЁЂКсвЁНЧЫйЖШЁЂКНЫйЕШаХКХЃЌАќРЈЭгТнвЧЁЂМгЫйЖШМЦЁЂЫйЖШДЋИаЦїЕШЁЃ
ЁЁЁЁPLCПижЦЦї
ЁЁЁЁЯЕЭГЕФКЫаФПижЦЕЅдЊЃЌИКд№НгЪеДЋИаЦїаХКХВЂИљОндЄЩшЕФПижЦЫуЗЈМЦЫуГіМѕвЁїЂЕФЖЏзїжИСюЁЃ
ЁЁЁЁжДааЛњЙЙ
ЁЁЁЁИљОнPLCЪфГіЕФПижЦаХКХЧ§ЖЏМѕвЁїЂдЫЖЏЃЌАќРЈвКбЙЯЕЭГЁЂЕчЛњЕШЁЃ
ЁЁЁЁШЫЛњНчУцЃЈHMIЃЉ
ЁЁЁЁгУгкЯдЪОЯЕЭГзДЬЌЁЂЩшжУВЮЪ§ЁЂНјааЙЪеЯеяЖЯЕШЁЃ

ЁЁЁЁ02ЛљгкPLCЕФМѕвЁїЂПижЦЯЕЭГЙЄзїСїГЬ
ЁЁЁЁЪ§ОнВЩМЏ
ЁЁЁЁДЋИаЦїЪЕЪБВЩМЏДЌЬхКсвЁНЧЁЂКсвЁНЧЫйЖШЕШдЫЖЏВЮЪ§ЃЌВЂДЋЪфжСPLCПижЦЦїЁЃ
ЁЁЁЁЪ§ОнДІРэ
ЁЁЁЁPLCЖдДЋИаЦїЪ§ОнНјааДІРэЃЌМЦЫуЕБЧАКсвЁзДЬЌЃЌВЂгыЩшЖЈФПБъБШНЯЃЌЩњГЩЮѓВюаХКХЁЃ
ЁЁЁЁПижЦМЦЫу
ЁЁЁЁPLCИљОндЄЩшПижЦЫуЗЈЃЈШчPIDЃЉЃЌМЦЫуГіМѕвЁїЂЫљашЕФЖЏзїжИСюЃЈШчЦЋзЊНЧЖШКЭЫйЖШЃЉЁЃ
ЁЁЁЁжДааПижЦ
ЁЁЁЁжДааЛњЙЙНгЪеPLCжИСюЃЌЧ§ЖЏМѕвЁїЂЦЌНјааЯргІЦЋзЊЃЌВњЩњЕжЯћКсвЁЕФЗДЯђЮШЖЈСІОиЁЃ

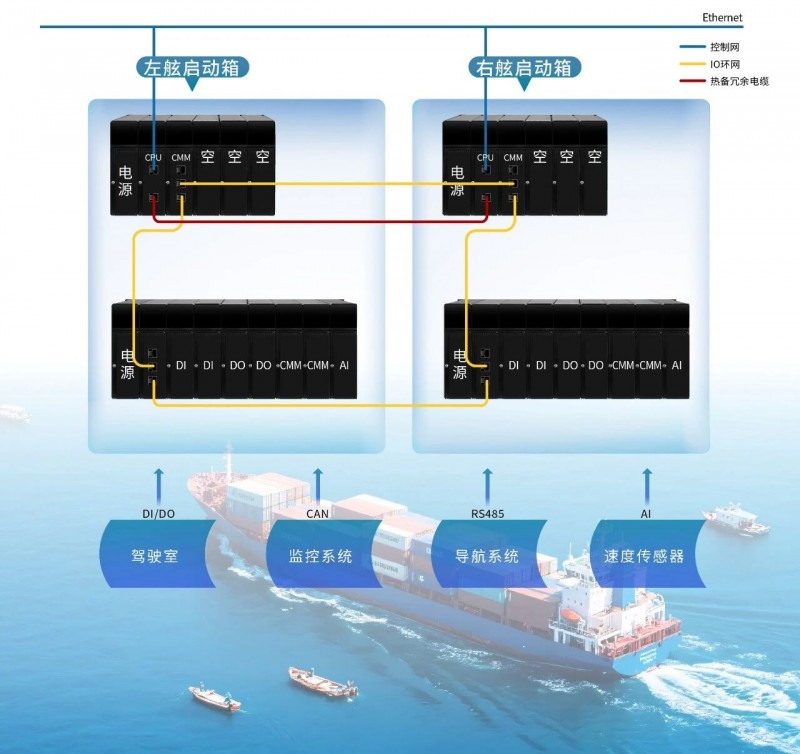
ЁЁЁЁПижЦЯЕЭГЗНАИНщЩмЃЈжаЙњДЌВАФГДЌЃЉ
ЁЁЁЁAКЫаФХфжУ
ЁЁЁЁИУЯЕЭГВЩгУАСЭиNJ400ЯЕСаPLCЁЃ
ЁЁЁЁBЯЕЭГМмЙЙ
ЁЁЁЁВЩгУЫЋЛњМмШпгрМмЙЙЃЌжїБИСНИіPLCЛњМмЗжБ№ЗХжУгкСНИіПижЦЙёжаЁЃ
ЁЁЁЁСНИівдЬЋЭјдЖГЬI/OЛњМмЗжБ№ПижЦзѓЁЂгвЯЯМѕвЁїЂЃЌВЂгыжїБИCPUЛњМмЙВЭЌзщГЩвдЬЋЭјЛЗЭјЁЃ
ЁЁЁЁCЛљБОЙЄзїдРэ
ЁЁЁЁЯЕЭГЭЈЙ§ФЃФтСПЪфШыФЃПщВЩМЏКсвЁНЧДЋИаЦїЃЈЭгТнвЧ/ЧуНЧвЧЃЉЕФаХКХЃЈКсвЁНЧЖШЁЂНЧЫйЖШЃЉЃЌОPLCФкВППижЦЫуЗЈдЫЫуКѓЃЌЪфГіжИСюЧ§ЖЏвКбЙгЭИзЖЏзїЃЌЭЦЖЏМѕвЁїЂзЊЖЏвдВњЩњЮШЖЈСІОиЃЌВЂНЋЫљгазДЬЌаХЯЂЩЯБЈжСжабыМрПиЯЕЭГЁЃ
ЁЁЁЁDЗНАИжївЊЬиЕу
ЁЁЁЁCPUадФмЃКCPU401-0511ВЩгУЙњВњДІРэЦїЁЃ
ЁЁЁЁCPUШпгрЃКЫЋЛњМмШпгрЁЃ
ЁЁЁЁЭјТчШпгрЃКМЏГЩЫЋЭјПкЃЌ10/100MздЪЪгІЁЃ
ЁЁЁЁзмЯпШпгрЃКвдЬЋЭјжїеОКЭДгеОаЮГЩЛЗЭјЃЛжЇГжBy-passЙІФмЁЃ
ЁЁЁЁИУЯЕЭГЕФГЩЙІгІгУЯджјЬсЩ§ДЌВАдкЖёСгКЃПіЯТЕФЮШЖЈадгыЪцЪЪЖШЃЌМѕвЁадФмДяСьЯШЫЎЦНЁЃЫцзХШЫЙЄжЧФмгыздЪЪгІЫуЗЈЕФЩюЖШШкКЯЃЌАСЭиPLCНЋГжајНјЛЏ——ИќжЧЛлЕФдЄВтПижЦЁЂИќЕЭЕФФмКФБэЯжЁЂИќЙуЗКЕФДЌВАЪЪХфФмСІЃЌЮЊжЧФмДЌВАКЭКЃбѓзАБИПижЦЯЕЭГЬсЙЉМсЪЕММЪѕЕззљЃЁ