ЁЁЁЁЛњЦїШЫЁЂЪБађЁЂЪгОѕЕФ
ЁЁЁЁЭГКЯПижЦЗНАИ
ЁЁЁЁПЮ Ьт
ЁЁЁЁФбвдЫѕЖЬНкХФЃЌЧвашвЊЖрУћЙЄГЬЪІ
ЁЁЁЁЖдЩшБИЕФЪБађКЭдЫЖЏПижЦЁЂЛњЦїШЫЗжБ№НјааБрГЬЃЌашвЊНЛЛЛИїжжаХКХВЂМьВщЪБађЃЌФбвдЫѕЖЬПижЦНкХФЁЃДЫЭтгЩгкБрГЬЗНЗЈВЛЭЌЃЌашвЊЖрУїЙЄГЬЪІЁЃ
ЁЁЁЁНтОіЗНАИ
ЁЁЁЁЭЈЙ§One softећКЯЛњЦїШЫКЭЛњЦїПижЦ
ЁЁЁЁЭГвЛЛњЦїШЫКЭЛњЦїПижЦЕФБрГЬгябдЃЌЪЙгУ1жжБрГЬгябд(IECгябд)РДПижЦЛњЦїШЫЁЃдквЛИіCPUФкЃЌPLCФмЙЛЭЈЙ§вЛДЮЩЈУшЭЌВНЛњЦїШЫЁЂдЫЖЏПижЦКЭДЋИаЦїЕФаХКХЃЌЮЊЫѕЖЬЩшБИНкХФзїГіЙБЯзЁЃ
ЁЁЁЁ

ЁЁЁЁЭЈЙ§One ControllerЪЕЯж
ЁЁЁЁЛњЦїШЫПижЦЁЂдЫЖЏПижЦЁЂЪБађПижЦ
ЁЁЁЁЪЕЯжММЪѕ
ЁЁЁЁ01ећКЯВЛЭЌПижЦРраЭЕФПижЦЦї
ЁЁЁЁНЋЖЈЦкжДаааЭГЬађ(PLCЙІФм)гыЫГађжДаааЭГЬађ(ЛњЦїШЫЙІФм)ЃЌСНжжЬиадЭъШЋВЛЭЌЕФв§ЧцећКЯдквЛИіПижЦЦїЩЯЃЌЪЕЯжЭЌВНПижЦЁЃ
ЁЁЁЁ

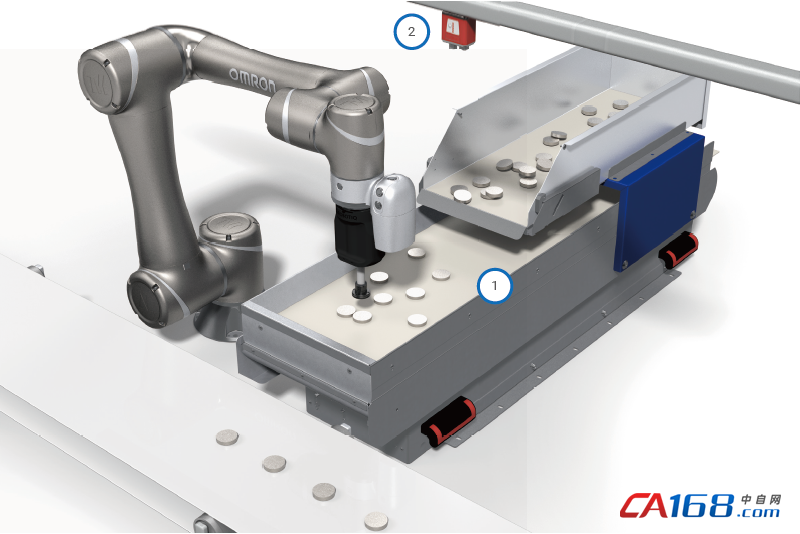
ЁЁЁЁ02ЩшБИФЃФт
ЁЁЁЁХфБИвЛЬхЛЏЗТецФЃФтЦїЃЌећКЯСЫPLCгыRobotЁЃВЂЧвЪЕЯжСЫгыЗТецФЃФтЦїЭЌВНЕФФЃФтММЪѕЁЃ
ЁЁЁЁ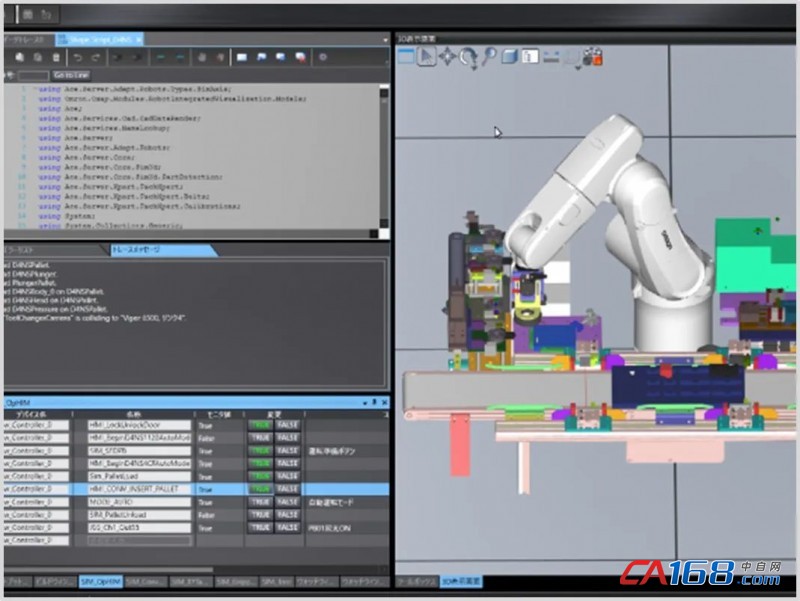
ЁЁЁЁ03зЗЫнадЙмРэ
ЁЁЁЁПЩНЋЭЈЙ§ПижЦЦїЙмРэЕФЪ§ОнгыЭМЯёЪ§ОнЙиСЊЃЌНјаавЛдЊЛЏЙмРэЁЃПЩИпаЇНјааЛљгкЪ§ОнЕФЧїЪЦЙмРэЁЂВЛСМЗжЮіЕШЁЃБИгаДјDBСЌНгЙІФмЕФCPUЁЃ