ЁЁЁЁЭМЯёДЋИаЦїЕФЖЏЬЌЗЖЮЇЪЧЦћГЕГЩЯёжаЕФвЛИіЙиМќжИБъЁЃЪВУДЪЧЖЏЬЌЗЖЮЇЃПЮЌЛљАйПЦЖЈвхЃЌЖЏЬЌЗЖЮЇЃЈDynamic RangeЃЉЪЧПЩБфЛЏаХКХЃЈР§ШчЩљвєЛђЙтЃЉзюДѓжЕКЭзюаЁжЕЕФБШжЕЁЃ

ЁЁЁЁПЩБфЛЏЕФаХКХSгаЖржжЃЌЖдвЛжЁЭМЯёЖјбдЃЌSЕФзюаЁжЕЮЊ1ЃЌзюДѓжЕЪмЯогкЪ§ОнДјПэЃЌМДЪ§ОнФмЙЛДцДЂЕФзюДѓжЕЁЃвЛеХ8ЮЛЕФЛвЖШЭМЃЌзюДѓжЕ255ЃЌДЫЪБРэТлЩЯЕФЖЏЬЌЗЖЮЇОЭЪЧ48dBЃЌ10ЮЛЭМЯёЖЏЬЌЗЖЮЇПЩЕН60dBЃЌ20ЮЛЭМЯёЖЏЬЌЗЖЮЇ120dBЁЃ
ЁЁЁЁЪЕМЪЩЯЃЌЖЏЬЌЗЖЮЇЪЧвЛИіЭЈгУЕФИХФюЃЌВЛЭЌЕФаХКХЛђепБфСПSЖМПЩвдЖЈвхздМКЕФЖЏЬЌЗЖЮЇЃЌЭМЯёДЋИаЦїгаЖЏЬЌЗЖЮЇЃЌЯдЪОЦїЃЌЭЖгАЛњЃЌДђгЁЛњЕШЕШЖМгаздМКЕФЖЏЬЌЗЖЮЇЁЃЮвУЧЩѕжСПЩвдЖЈвхвЛИіШЫЕФЖЏЬЌЗЖЮЇЃЌШчЙћетИіШЫЬѕМўМшПрЪБФмГдПрЃЌЬѕМўгХфзЪБЛсЯэЪмЃЌМШФмНЋОЭвВЛсНВОПЃЌетОЭЪЧИіИпЖЏЬЌЗЖЮЇЕФКнШЫЁЃ
ЁЁЁЁЭМЯёЕФЖЏЬЌЗЖЮЇКЭГЁОАЕФЖЏЬЌЗЖЮЇЃЌДѓЖрЪ§ЧщПіЪЧВЛвЛжТЕФЁЃ
ЁЁЁЁГЁОАЕФаХКХSВЛЪЧЭМЯёЕФЛвЖШжЕЃЌЫќЪЧГЁОАЗЂЩфЙтЯпЕФССЖШЁЃПЩвдРэНтЮЊSзюДѓжЕЪЧГЁОАжазюССВПЗжЕФССЖШЃЌSЕФзюаЁжЕЪЧГЁОАжазюКкВПЗжЕФССЖШЁЃЫќгыЭМЯёЖЏЬЌЗЖЮЇЯрЙиЕЋВЛЯрЕШЁЃЭЌЪБЭМЯёЕФКѓДІРэЭЈГЃЛсАбЯпадЪ§ОнбЙЫѕЮЊЗЧЯпадЪфГіЃЌетвВЛсЗХДѓЭМЯёЪ§жЕКЭГЁОАЖЏЬЌЗЖЮЇЕФВювьЁЃ

Figure 1ПэЖЏЬЌЕфаЭГЁОА
ЁЁЁЁШчЙћАбГЁОАЕФССЖШзїЮЊКсзјБъЃЌЭМЯёДЋИаЦїЪфГіЕФЪ§ОнзїЮЊзнзјБъЃЌЮвУЧОЭЕУЕНЭМ2ЫљЪОЕФsensorЪфГіКЭГЁОАЕФЖЏЬЌЗЖЮЇгГЩфЙиЯЕЁЃЭМЯёДЋИаЦїАбвЛЖЈССЖШЗЖЮЇЕФГЁОАВЩМЏВЂгГЩфЮЊздМКЕФЪфГіЃЌШчЭМжаКьПђЫљЪОЁЃ
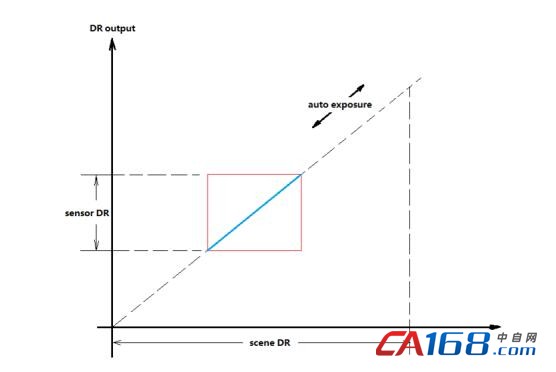
Figure 2 ГЁОАЕНsensorЕФЖЏЬЌЗЖЮЇгГЩф
ЁЁЁЁЭМЯёДЋИаЦїЪЕМЪЖЏЬЌЗЖЮЇЭЈГЃБШГЁОАЕФЖЏЬЌЗЖЮЇЕЭЃЌДЋИаЦїЕФФмСІжЛФмВЩМЏКьПђЖдгІКсзјБъФкГЁОАЕФССЖШЗЖЮЇЁЃКьПђЕФЮЛжУашвЊЖЏЬЌЕїећвЦЖЏЃЌвдЪЪгІГЁОАССЖШЕФБфЛЏЃЌетЪЧГЩЯёЫуЗЈжаздЖЏЦиЙт(auto exposure)ФЃПщЕФШЮЮёЁЃ
ЁЁЁЁЖдЦћГЕИпЖЏЬЌЗЖЮЇЕФГЁОАЃЌЛсгаЭЌвЛГЁОАжаМЋССКЭМЋАЕВПЗжЭЌЪБГіЯжЕФЧщПіЃЌР§ШчвЙМфНжЕРЃЌМШгаГЕДѓЕЦвВгаНжЕРЕФАЕНЧЃЌДЫЪБвЦЖЏКьПђвбОЮоЗЈЭЌЪБПДЧхГўСНИіВПЗжЃЌБиаыАбКьПђзіДѓЃЌетОЭЪЧЦћГЕЩЯгУЕНЕФИпЖЏЬЌЗЖЮЇЭМЯёДЋИаЦїЁЃ
ЁЁЁЁДгдРэЩЯНВЃЌКьПђГпДчЪмЯогкДЋИаЦїЕФЯёЫиЪЦкхШнСПЃЌЪмЯогкГпДчЃЌКмФбМђЕЅзіДѓЃЌГЕгУЭМЯёДЋИаЦїЕФИпЖЏЬЌЗЖЮЇММЪѕЪЧаавЕУцСйЕФЙВЭЌЬєеНЁЃЙ§ШЅЖўЪЎФъРДЃЌГЕдиЭМЯёДЋИаЦїЕФИпЖЏЬЌЗЖЮЇДѓжТгаШчЯТЫФДѓММЪѕСїХЩЁЃ
ЁЁЁЁЕквЛИіЪЧЖЏЬЌИФБфЯёЫиЕФСщУєЖШРЉГфЖЏЬЌЗЖЮЇЁЃШчЭМ3ЫљЪОЃЌЭМЯёДЋИаЦїЖдГЁОАССЖШЕФгГЩфБфГЩЗЧЯпадЃЌЫцзХЛЗОГССЖШдіМгЃЌЯёЫиСщУєЖШж№НЅЯТНЕЃЌСщУєЖШДгССЖШЕФЯпадКЏЪ§БфГЩЗжЖЮКЏЪ§ЁЃШчЯТЭМЫљЪОЃЌЕчКЩЛ§РлЗжГЩШ§ЖЮЃЌССЖШЕЭЪБСщУєЖШИпЃЌЖдгІКкЩЋЕчКЩЃЌШЛКѓССЖШжаЕШСщУєЖШвВжаЕШЃЌЖдгІРЖЩЋЕчКЩЃЌзюКѓССЖШзюИпСщУєЖШзюЕЭЁЃДгзјБъЭМжаПЩвдПДЕНЃЌДЫЪБЯёЫиЕФЪЦкхШнСПМДзнзјБъВЛдіМгЃЌЕЋгГЩфЕФГЁОАССЖШЗЖЮЇМДКсзјБъПЩвдУїЯдМгДѓЃЌЪЕЯжСЫдіДѓЖЏЬЌЗЖЮЇЕФФПБъЁЃ
ЁЁЁЁАВЩУР(onsemi)ЕФГЕгУЭМЯёДЋИаЦїВњЦЗЯпдчЦкЭЦГіЙ§30ЭђЯёЫиЕФПЩБфСщУєЖШsensorЃЌОЭЪЧЛљгкДЫРрММЪѕЃЌетИіММЪѕЕФзюДѓЬєеНдкгкЫќИФБфСЫЯёЫиЕФСщУєЖШЬиадЃЌШУЯпадЬиадЕФСщУєЖШБфГЩЗЧЯпадЃЌЖјетИіелЯпЕФаЮзДЖдЕчбЙЁЂЮТЖШКЭЦиЙтЪБГЄУєИаЃЌвЛжТадВюЃЌЖЏЬЌЗЖЮЇРЉеЙФмСІгаЯоЃЌжЛФмУуЧПгУгкДѓГпДчЯёЫиКкАзЭМЯёЕФДЋИаЦїЁЃФПЧАетРрММЪѕвбОж№НЅБЛЪаГЁЬдЬЁЃ
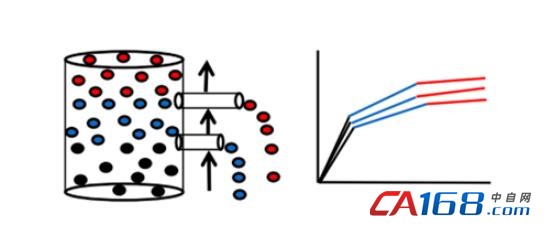
Figure 3 ЗЧЯпадЛЏРЉГфЖЏЬЌЗЖЮЇ
ЁЁЁЁЕкЖўИіИпЖЏЬЌЗЖЮЇММЪѕЪЧЪБЗжЖрДЮЦиЙтЁЃетИіЪЧФПЧАжїСїГЕгУЭМЯёДЋИаЦїЫљВЩгУЕФММЪѕЁЃзіЗЈОЭЪЧЭМЯёДЋИаЦїИФБфЦиЙтЪБМфСЌајЖрДЮЦиЙтЕУЕНЖржЁЭМЯёЃЌШЛКѓДгжабЁдёКЯЪЪЯёЫиКЯВЂГЩвЛжЁЭМЯёЁЃШчЭМ4ЪОвтЃЌДЋИаЦїИФБфЦиЙтЪБМфЃЌЯрЕБгкздДјздЖЏЦиЙтЙІФмЃЌЖдГЁОАВЛЭЌССЖШЗжБ№ВЩбљЃЌЕУЕНЖрИіКьПђЃЌШЛКѓАбЖЏЬЌЗЖЮЇЦДНгЦ№РДЁЃетИіММЪѕЕФгХЕудкгкЃКЯёЫиЪЦкхШнСПВЛгУЖюЭтзіДѓЃЌжЛашАбЪ§ОнДјПэзіДѓЃЛУПИіЦиЙтЕФЪБГЄПижЦПЩвдКмОЋШЗЃЌзюжеФтКЯЕФЭМЯёССЖШЯпадЬиадКУЃЛЖЏЬЌЗЖЮЇРЉеЙШнвзЃЌНігУЪБЗжММЪѕОЭФмзіЕН140dBЕФЖЏЬЌЗЖЮЇЁЃ
ЁЁЁЁЪБЗжЖрДЮЦиЙтММЪѕгавЛИіФбвдПЫЗўЕФЮЪЬтЃЌгЩгкsensorЕФСЌајЦиЙтЪБМфЩЯЪЧвРДЮжЭКѓЕФЃЌЕБГЁОАжагаПьЫйвЦЖЏЮяЬхЛђЙтееОчСвБфЛЏР§ШчLEDЦЕЩСЧщПіЯТЃЌЖржЁЭМЯёФтКЯКѓЛсГіЯждЫЖЏЮяЬхЮБгАКЭЩЋВЪдыЩљЁЃADASЫуЗЈашвЊеыЖдадЕибЕСЗетРрдыЩљЁЃ
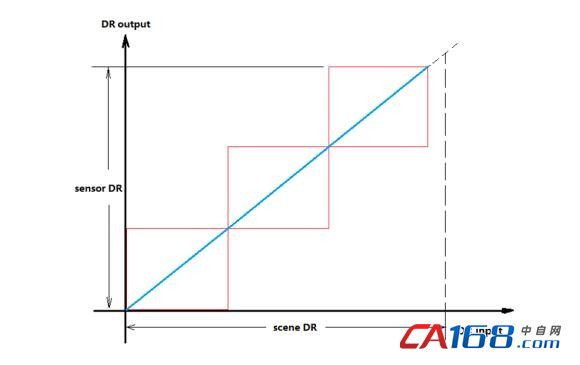
Figure 4 ЖржЁКЯВЂРЉГфЖЏЬЌЗЖЮЇ
ЁЁЁЁЕкШ§ИіИпЖЏЬЌЗЖЮЇММЪѕЪЧПеЗжЖрДЮЦиЙтЃЌвЕФквВгаГЦжЎЮЊДѓаЁЯёЫиММЪѕЁЃБОжЪРДЫЕгыЪБЗжЖрДЮЦиЙтРрЫЦЃЌгЩЖржЁШкКЯЃЌЧјБ№дкгкЭМ4жаЕФЖрИіКьПђРДдДгкПеМфГпДчЩЯВЛЭЌЕФСНжжЯёЫиЃЌСНжжЯёЫиЕФЭМЯёФтКЯГЩЮЊвЛеХЭМЯёЁЃгЩгкСНжжЯёЫидкЦиЙтЪБМфЩЯЪЧЖдЦыЕФЃЌПЩвдБмУтСЫдЫЖЏжигАЕФЮЪЬтЃЌЭЌЪБИФЩЦLEDЕЦЦЕЩСЯжЯѓЁЃ
ЁЁЁЁВЛЙ§гаЕУОЭгаЪЇЃКПеЗжЦиЙтЃЌвтЮЖзХЯёЫиЪ§СПЗБЖЃЌ Р§Шч1АйЭђЯёЫиДЋИаЦїЪЕМЪЩЯЪЧ1АйЭђДѓЯёЫиМг1АйЭђаЁЯёЫиЃЌдіМгСЫЙІКФКЭЩшМЦИДдгЖШЃЛаЁЯёЫиМЗеМСЫДѓЯёЫиЕФУцЛ§ЃЌНЕЕЭСЫДѓЯёЫиЕФЕЭееадФмЃЛДѓаЁЯёЫиЕФСщУєЖШВювьДѓЃЌЯпадЬиадВюЃЌаЁЯёЫидкЙтбЇЩЯЮоЗЈКЭДѓЯёЫиМцШнЃЌашвЊДѓСПЕФЙтбЇБъЖЈЙЄзївдВЙГЅаЁЯёЫиЕФЮЪЬтЁЃетаЉЖМЪЧгУЛЇдкВњЦЗгІгУПЊЗЂжаашвЊНтОіЕФЙЄГЬЬєеНЃЌДЫЭтЃЌДѓаЁЯёЫиЭМЯёДЋИаЦїЪмаЁЯёЫиГпДчЯожЦЃЌЫцзХММЪѕбнНјЛсж№НЅБфГЩЦПОБЃЌЫљвдАВЩУРдк2009ФъОЭЗЂУїВЂЩъЧыСЫДѓаЁЯёЫиММЪѕЕФзЈРћЃЌЕЋВЂУЛгаЭЦГіЯргІЕФДЋИаЦїВњЦЗЁЃ
ЁЁЁЁЕкЫФИіИпЖЏЬЌЗЖЮЇММЪѕОЭЪЧжБНгРЉеЙЯёЫиЕФЪЦкхШнСПЁЃДЋЭГЭМЯёДЋИаЦїЯёЫиЕФИаЙтЖўМЋЙмдкИаЙтЕФЭЌЪБМцОпЕчКЩДцДЂЕФЙІФмЃЌвђДЫЯёЫиЕФЕчКЩЪЦкхШнСПЪмЯогкИаЙтЖўМЋЙмГпДчЁЃЫцзХЯёЫиГпДчдНРДдНаЁЃЌЯёЫиЕФШнСПвВж№НЅБфаЁЁЃАВЩУРЕФГЌМЖЦиЙтЯёЫиММЪѕЭЛЦЦСЫетвЛЯожЦЃЌВЂдквЕФкТЪЯШСПВњСЫЛљгкетвЛММЪѕЕФВњЦЗЁЃММЪѕТЗОЖОЭЪЧЮЊИаЙтЖўМЋЙмЭтЙвСЫДцДЂЕчШнЃЌЕБШнСПБЅКЭЪБЃЌЖргрЕФЕчКЩЛсБЛзЊвЦЕНЕчШнжаДцДЂЦ№РДЁЃетРяЕФЕчШнВЛВЮгыЙтбЇИаЙтЃЌЕЋРЉГфСЫЯёЫиЕФЪЦкхШнСПЁЃШчЭМ5ЪОвтЃЌЩЯУцЕФаЁЭАЯрЕБгкИаЙтЖўМЋЙмЃЌЯТУцЕФДѓЭАЯрЕБгкДцДЂЕчШнЁЃДѓЭАВЛжБНгНгЫЎЃЌжЛДцДЂаЁЭАвчГіЕФЫЎЁЃ

Figure 5 ИажЊКЭДцДЂЗжРы
ЁЁЁЁГЌМЖЦиЙтЯёЫиАбЕчКЩДцДЂЙІФмДгИаЙтЖўМЋЙмАўРыГіРДЃЌЬјГіСЫЙЬгаЯожЦЃЌЪЕЯжСЫЯёЫиЖЏЬЌЗЖЮЇКЭИаЙтЖўМЋЙмЕФНтёюЁЃетвЛММЪѕОпгаСМКУЕФЯпадЬиадЃЌБЃСєСЫЕЅвЛЯёЫиМмЙЙЃЌЮоашИДдгЕФЙтбЇБъЖЈЃЌВЂНтОіСЫЪБЗжЕМжТЕФЮБгАКЭLEDЦЕЩСЕФЮЪЬтЁЃгыИаЙтЖўМЋЙмЕФНтёюЃЌПДЫЦМђЕЅЕФвЛВНЃЌШДДђПЊСЫЮДРДИќаЁЯёЫиЃЌИќДѓЖЏЬЌЗЖЮЇВњЦЗЕФЩшМЦЯыЯѓПеМфЁЃ
ЁЁЁЁЮЊСЫжЇГжзуЙЛИпЕФЖЏЬЌЗЖЮЇЃЌвЕФкВњЦЗЭЈГЃЛсИДгУЩЯЪіШ§жжММЪѕЁЃвЛеХИпЖЏЬЌЗЖЮЇЕФЭМЯёЃЌПЩФмЪЧЪБЗжЖрДЮЦиЙтжЁЃЌДѓаЁЯёЫижЁЃЌКЭГЌМЖЦиЙтжЁЕФИДКЯФтКЯНсЙћЁЃетгаЕуЯёЦћГЕЖЏСІжаЕФВхЛьЗНАИЃЌЖЏСІПЩФмРДздздХХЗЂЖЏЛњЃЌЮаТждібЙЃЌвдМАЕчЛњжБЧ§ЕФВЂСЊЁЃетРяЖржЁФтКЯЕФЯпадЬиадКмЯёЦћГЕМнЪЛЖЏСІБфЛЏЕФЯпадЬиадЃЌБЃжЄЪфГіЕФЦНЫГгыЯпадЪЧИпЖЏЬЌЗЖЮЇЭМЯёЕФОоДѓЬєеНЁЃвЛАуРДЫЕЃЌММЪѕжжРрдНЩйЃЌЯпадЬиаддНКУЁЃ
ЁЁЁЁаЁНсвЛЯТЃЌCMOSЭМЯёДЋИаЦїЕФЖЏЬЌЗЖЮЇЪЧЦћГЕгІгУжаживЊЕФВЮЪ§жИБъЃЌЫќЪЧФПЧАвЕФкЙВЭЌУцСйЕФММЪѕЬєеНЃЌетРяНщЩмСЫМИжжДЋЭГЖЏЬЌЗЖЮЇРЉеЙММЪѕЕФЬиЕуЃЌвдМАаТГіЯжЕФГЌМЖЦиЙтЯёЫиММЪѕЃЌЫќЕФГіЯжДђЦЦСЫМШгаММЪѕЕФёНОЪЃЌЮвУЧдЄЦкЛсдкЪаУцЩЯПДЕНИќЖрЯрЙиЕФгХауВњЦЗгПЯжЁЃ