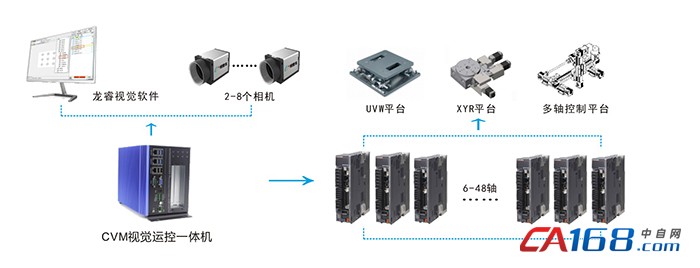
传统视觉与运动控制项目一般采用视觉系统+PLC或运动控制卡的形式,需要不同的编程人员参与,存在一定难度,需要花费大量时间和精力。视觉龙创新产品“CVM视觉与运动控制一体机”打破传统控制流程,不需要开发人员参与,调试人员就可以完成整个项目。大幅降低应用门槛,缩短项目时间,降低项目成本,售后维护简单,将视觉与运动控制项目简单化。

项目实例
视觉龙“龙马”运控软件采用图形化来表示控制编程逻辑,简单易用,支持多品牌运动控制如雷赛、固高等;支持单轴和多轴点位运动;支持多轴插补运动,如直线、圆弧;支持位置比较功能(飞拍);支持多种运动模型,如码垛等。
此例程为标签自动贴合设备电控+视觉定位程序介绍
设置2个设置插补轴坐标系,一个3轴,一个2轴。
00程序:运动到纠偏拍照点
01程序:运动到纠偏拍照点
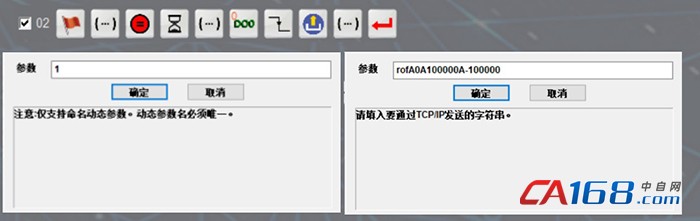
02程序:给视觉系统发出拍照指令
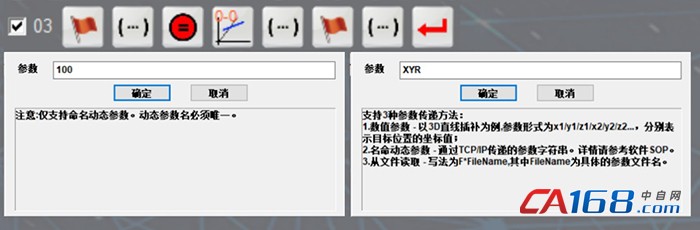
03程序:接收到视觉系统纠偏指令进行纠偏
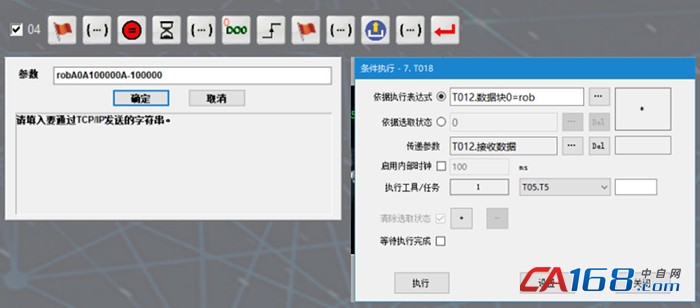
04程序:运动到复检拍照点,发出复检拍照指令

00程序:DI0输入上升沿信号,RXY轴运动到0,100000,-100000后发出通知事件1。
01程序:通知事件101有效,RXY轴运动到0,100000,-100000后发出通知事件1。
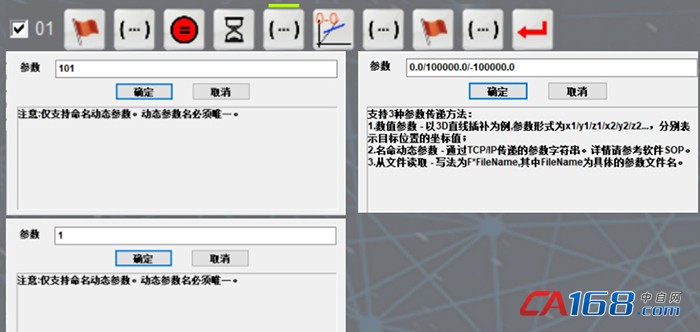
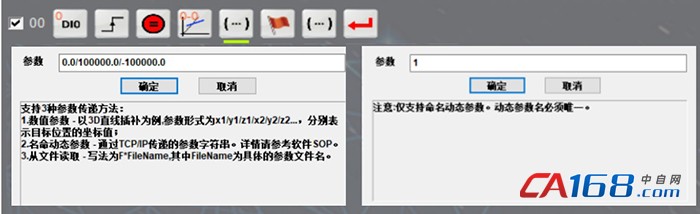
02程序:通知事件1有效,延时后发出通信指令rofA0A100000A-100000,其中A为间隔符,由视觉软件设置。
03程序:通知事件100有效(有视觉软件发出),按照视觉发出的纠偏坐标进行纠偏,纠偏完成后发出通知事件。
04程序:通知事件有效,延时后发出通信指令robA100000A-100000,触发视觉任务5进行复检。
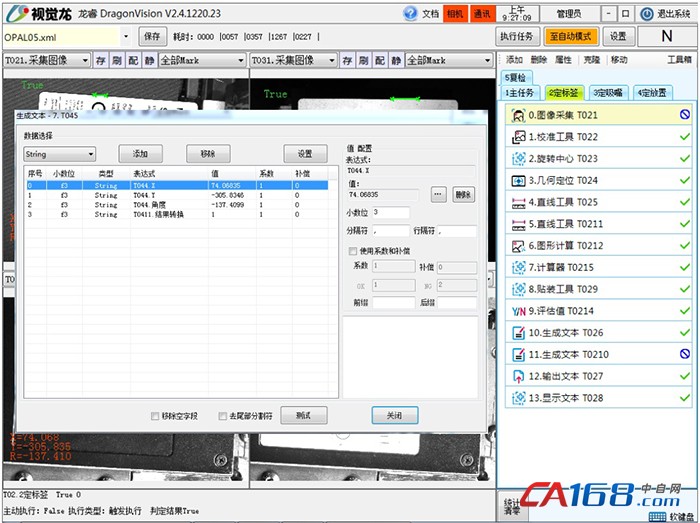
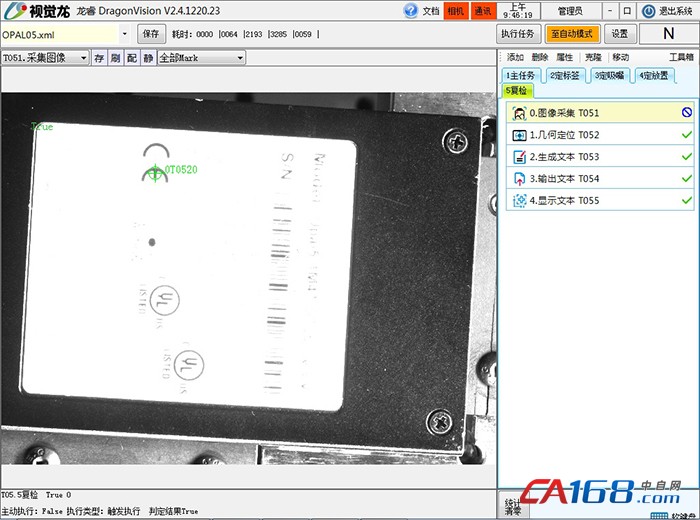
采用视觉龙自主研发的“龙睿”视觉软件定位引导算法,定位精度可达到1/40亚像素。支持多种运动平台定位和对位功能,可以实现装配、上下料、传送带跟踪、打磨、码垛、切割、打标等应用。
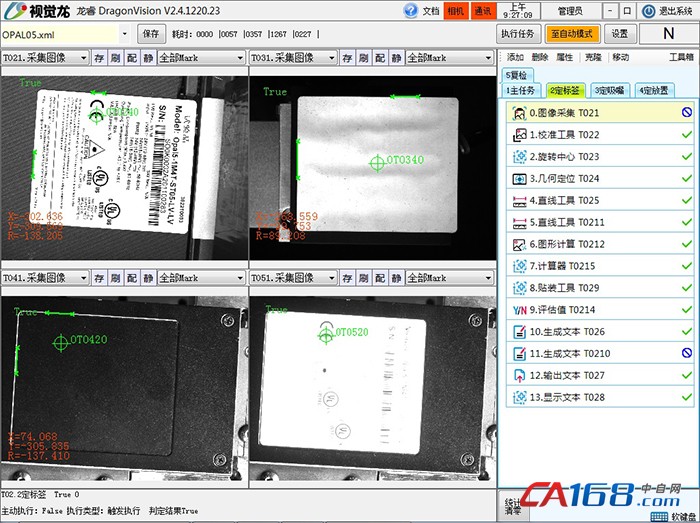
视觉系统定位标签位置
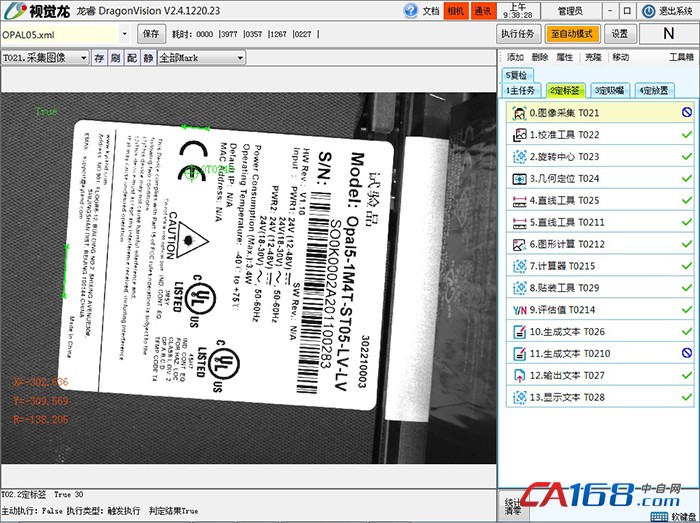
视觉系统定位标签在吸嘴上位置
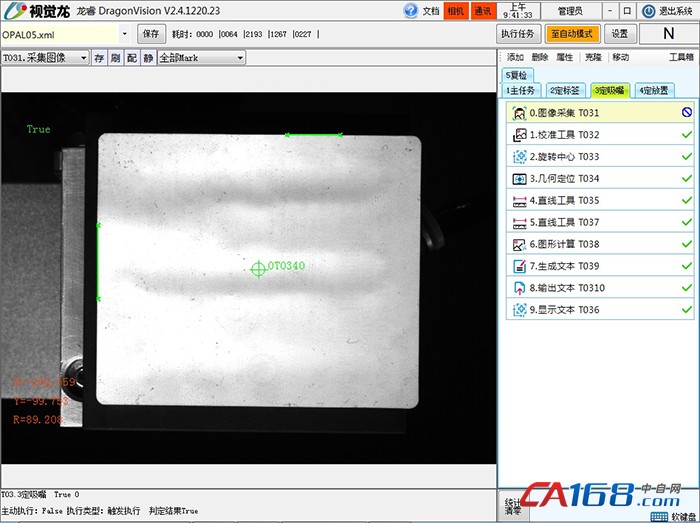
视觉系统定位贴合产品的位置
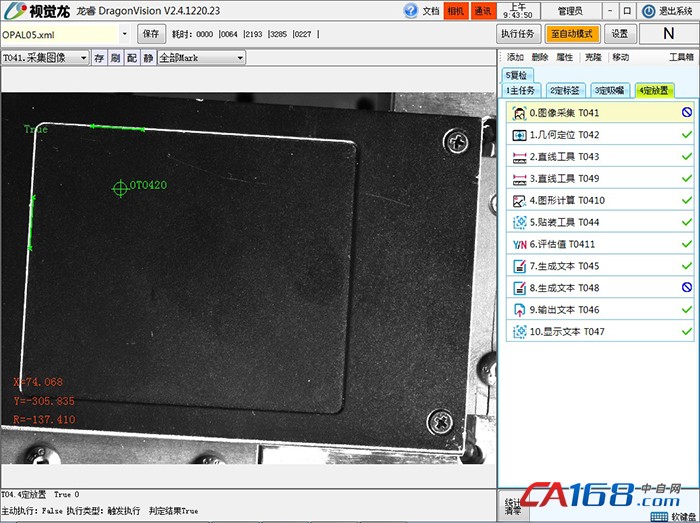
视觉系统复检最终贴合状态
视觉系统计算出纠偏绝对位置坐标,生产数据格式为 WRITE#XYR#/-74.836/-305.300/-137.200
运动系统运动到该位置,完成纠偏。