ЁЁЁЁаЇТЪКЭАВШЋЪЧТыЭЗГжжЎвдКуЕФзЗЧѓЁЃЫцзХПЦММЕФНјВНЃЌИїРраХЯЂЛЏЁЂжЧФмЛЏзАБИж№ВНдкТыЭЗжаеЙПЊгІгУЃЌПЦММЕФБфИявВЖдТыЭЗзАаЖЩшБИЬсГіСЫИќИпЕФвЊЧѓЁЃ
ЁЁЁЁЩЂЛѕзАаЖздЖЏЛЏЁЂжЧФмЛЏГЩЮЊЕБЯТИлПкШІШШУХЕФЛАЬтЁЃгУгкЩЂЛѕзАаЖЕФЕФзЅЖЗаЖДЌЛњвЊЪЕЯжздЖЏЛЏЃЌЦфЯЕЭГашвЊЧхЮњВЂМАЪБЛёШЁДЌВеВеПкЮЛжУгыДѓаЁЁЂИїИіВеФкЛѕЮяЖбЗХТжРЊаЮЬЌЁЂзЅЖЗЕБЧАЪЕЪБЮЛжУЕШЖрЗНУцЙиМќЪ§ОнЃЌвђДЫЃЌвЛЬзЮШЖЈПЩППЁЂИажЊзМШЗЁЂЗДгІСщУєЕФздЖЏЛЏНтОіЗНАИЖдзЅЖЗаЖДЌЛњЕФИпаЇЮШЖЈдЫаажСЙиживЊЁЃ
ЁЁЁЁзЅЖЗаЖДЌЛњздЖЏЛЏЕФ
ЁЁЁЁжївЊФбЕу
ЁЁЁЁЩЂЛѕТыЭЗЙЄПіЖёСгЃЌбяГОДѓЁЂеёЖЏДѓЁЂНќКЃИпбЮЮэЃЌгъЮэЬьЦјКЭДѓЗчЬьЦјНЯЖр
ЁЁЁЁзЅЖЗШЁСЯЪБашЩюШыДЌВеВЂЪБГЃБЛЮяСЯТёУЛЃЌДЋЭГЖЈЮЛДЋИаЦїЮоЗЈАВзА
ЁЁЁЁЮЊБЃжЄаЖДЌаЇТЪЃЌздЖЏЛЏаЖДЌЛњашвЊздЖЏЛЏММЪѕгыТыЭЗЙЄвеКЭОбщЩюЖШНсКЯ
ЁЁЁЁздЖЏЛЏзЅЖЗаЖДЌЛњЖдЯЕЭГЯьгІМАЪБадЁЂЮШЖЈадвЊЧѓИп
ЁЁЁЁЮїУХзгзЅЖЗаЖДЌЛњ
ЁЁЁЁздЖЏЛЏНтОіЗНАИ
ЁЁЁЁ

ЁЁЁЁзЅЖЗЪЕЪБЖЈЮЛЯЕЭГ
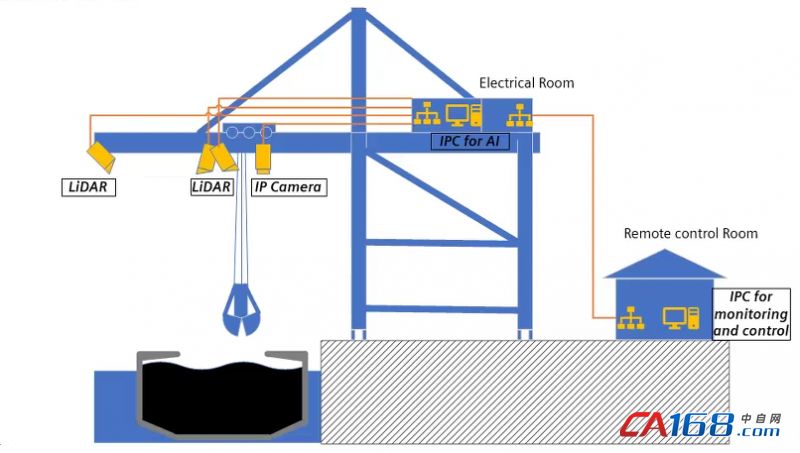
ЁЁЁЁЫЋШпгрЗНАИЃЌ3DМЄЙтЩЈУшММЪѕгыAIЪгОѕММЪѕЯрНсКЯЃЌЪЕЯжзЅЖЗЙЄзїЗЖЮЇФкЕФШЋгђЮЛжУЪЕЪБИажЊ
ЁЁЁЁЮоНгДЅЪНЖЈЮЛЃЌЮоашЖдзЅЖЗНјааШЮКЮИФЖЏМДПЩЪЕЯжзЅЖЗдЫЖЏФЃаЭЕФБеЛЗПижЦ
ЁЁЁЁИпЦЕИќаТЃЌзЅЖЗЪЕЪБЮЛжУИќаТЪБМф-200msЃЌИќПьЕФЗДгІЫйЖШЮЊаЖДЌЛњЬсЙЉИќЧПДѓЕФАВШЋБЃеЯ
ЁЁЁЁзЅЖЗЪЕЪБЖЈЮЛЯЕЭГ
ЁЁЁЁДЌаЭЩЈУшЯЕЭГ
ЁЁЁЁЮїУХзгаЖДЌЛњДЌаЭЩЈУшЯЕЭГЃЌЭЈЙ§АВзАдкаЖДЌЛњжїСКЩЯЕФ3DМЄЙтЩЈУшвЧЖдЛѕДЌНјааЪЕЪБЩЈУшЃЌВЂдкIPCжаНјааЪЕЪБЕФШ§ЮЌФЃаЭжиЫмЃЌОДІРэЗжЮіКѓЬсШЁМзАхИпЖШЁЂДЌВеПкзјБъЁЂДЌВеФкЮяСЯИпГЬЗжВМгыТжРЊЕШЬиеїЪ§ОнЁЃ
ЁЁЁЁЮїУХзгаЖДЌЛњздЖЏЛЏЯЕЭГИљОнЬсШЁЕНЕФЬиеїЪ§ОнЪЕЯжздЖЏШЗЖЈзЅШЁЕуЮЛЁЂздЖЏМЦЫузюгХТЗОЖЁЂжЧФмЗРХізВЕШИпМЖЙІФмЁЃ
ЁЁЁЁДЌаЭЩЈУшЯЕЭГЬиЕу
ЁЁЁЁДЌЬхШ§ЮЌФЃаЭЪЕЪБПЩЪгЛЏГЪЯжЃЌЯдЪОИќаТЪБМф200msЁЃ
ЁЁЁЁЬиеїЪ§ОнЬсШЁзМШЗПьЫйЁЃ
ЁЁЁЁВеФкЮяСЯИпГЬЗжВМЭМЖЏЬЌЯдЪОЃЌЙиМќаХЯЂвЛФПСЫШЛЁЃ
ЁЁЁЁ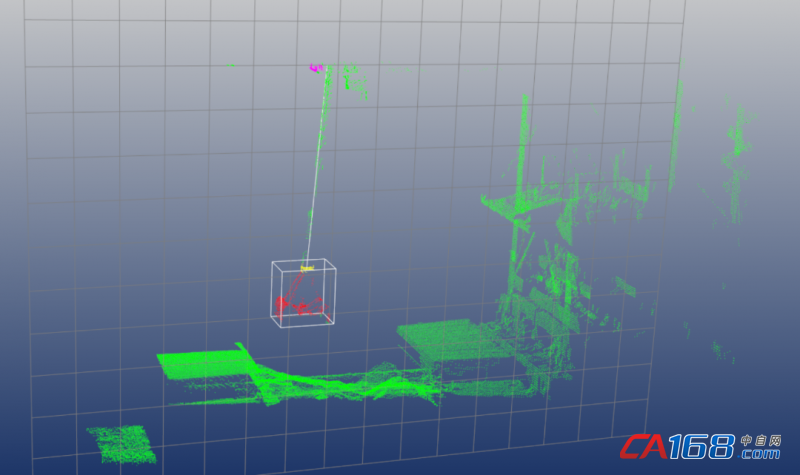
ЁЁЁЁДЌаЭЩЈУшЯЕЭГ
ЁЁЁЁзЅЖЗШЋБеЛЗвЁАкПижЦЯЕЭГ
ЁЁЁЁЮїУХзгаЖДЌЛњзЅЖЗвЁАкПижЦЯЕЭГЛљгкЯШНјЕФЮїУХзгSIMOTIONПижЦЦїЃЌНсКЯЮїУХзгаЖДЌЛњзЅЖЗЪЕЪБЖЈЮЛЯЕЭГПЩЪЕЯжБеЛЗЕФЁЂЦ№Щ§ДѓаЁГЕШ§ЮЛвЛЬхЕФвЁАкПижЦЃЌБЃжЄЗРвЁаЇЙћКЭЮЛжУПижЦЭъУРЭГвЛЁЃ
ЁЁЁЁЕуЖЏФЃЪНЯТзЅЖЗдкШЮКЮАкГЄЩЯЕФАкЖЏНЧЖШОљВЛДѓгк0.01ЛЁЖШЃЌздЖЏФЃЪНЯТПЩзджїЩњГЩзюМбЗРвЁТЗОЖЃЌУжВЙДЋЭГЫОЛњЪжЖЏЗРвЁКЭаЖСЯЖЈЮЛЕФШБЯнЃЌгааЇНЕЕЭЫОЛњЕФРЭЖЏЧПЖШЃЌЬсИпЩшБИЕФЩњВњаЇТЪЁЃ
ЁЁЁЁЭЌЪБШЋБеЛЗЕФвЁАкПижЦдкзЅЖЗЪмДѓЗчЕШЭтВПЛЗОГгАЯьЖјЛЮЖЏЪБздЖЏМьВтЃЌздЖЏЮШЖЗЁЃ
ЁЁЁЁвЁАкПижЦЯЕЭГПЩЪЕЯж
ЁЁЁЁСЯЖЗЩЯЗНздЖЏЗЩаааЖСЯ
ЁЁЁЁДЌВеЯТЗНЗЩаазАСЯЃЈБкзЅКЭЬЭВжЃЉ
ЁЁЁЁаЁГЕЗНЯђздЖЏЗРвЁЯћАк
ЁЁЁЁДѓГЕЗНЯђздЖЏЗРвЁвЦЮЛ
ЁЁЁЁзЅЖЗИпЫйдЫЖЏЪБХЄЖЏвжжЦ
ЁЁЁЁДЌВеФкДѓЁЂаЁГЕЮЂЖЏЕїећЗРвЁ
ЁЁЁЁжЧФмЗРХізВЯЕЭГ
ЁЁЁЁЮїУХзгаЖДЌЛњжЧФмЗРХізВЯЕЭГЕїгУЮїУХзгаЖДЌЛњзЅЖЗЪЕЪБЖЈЮЛЯЕЭГгыЮїУХзгаЖДЌЛњДЌаЭЩЈУшЯЕЭГДІРэКѓЕФЪ§ОнЃЌНсКЯаЁГЕЪЕЪБЫйЖШЁЂМгЫйЖШвдМАзЅЖЗЮЛжУЪ§ОнЃЌГжајМрВтзЅЖЗдЫаазДЬЌВЂЪЕЪБдЄВтзЅЖЗЮДРДвЛЖЮЪБМфЕФЮЛжУгызюДѓАкЗљЃЌдкПЩФмЗЂЩњХізВжЎЧАздЖЏНјаагааЇИЩдЄЃЌЙцБмзЅЖЗКЭДЌВеЕФХізВЗчЯеЁЃ
ЁЁЁЁжЧФмЗРХізВЯЕЭГдкЫОЛњЪжЖЏВйзїЪБвРШЛПЩвдгааЇМрВтКЭИЩдЄЃЌзюДѓГЬЖШЕиЙцБмХізВЗчЯеЁЃЭЌЪБЯЕЭГздЖЏдЫааЁЂздЖЏОіВпЃЌЮоашЫОЛњШЋГЬМрПиЃЌдкВЛдіМгЫОЛњРЭЖЏЧПЖШЕФЧщПіЯТДѓЗљЬсЩ§зївЕАВШЋадЃЌЮЊздЖЏЛЏаЖДЌЛњБЃМнЛЄКНЁЃ
ЁЁЁЁЦ№жиЛњRCOSдЖГЬВйПиЦНЬЈ
ЁЁЁЁЛљгкОЙ§АВШЋШЯжЄЕФЮїУХзгWinCC OAЦНЬЈПЊЗЂЃЌЪЪгУгкашвЊАВШЋЪгЦЕаХЯЂСЊЭјМАШпгрЖШИпЕФдЖГЬВйПиЦНЬЈЯЕЭГЃЌОпгаИпПЩППЕФЭЈаХадФмЁЃЪЕЪБАВШЋЕФЪ§ОнЭЈаХШЗБЃЮоШЫжЕЪиЙ§ГЬжаШЮЮёздЖЏЯТЗЂЕФзМШЗадгыПЩППадЁЃ
ЁЁЁЁЪгЦЕаХКХЭЈЙ§АВШЋМрПиЯЕЭГНгШыЃЌЪЕЪБШЋЗНЮЛМрВтЯжГЁЩшБИЃЌЭЌЪБИљОнЩшБИдЫааЙЄПіЃЌЩуЯёЛњздЖЏИњзйЙиМќЮЛжУЁЃ
ЁЁЁЁВЩгУЭГвЛМЏжаЕФПижЦЗНЪНЃКгУгкRCOSШЮЮёЙмРэЕФIPCВПЪ№дкдЖПиЪвЃЌИпаЇЕФЖрЛњаЭЌЙІФмЪЕЯжЩшБИМфаХЯЂНЛЛЅЙВЯэвдМАЖрЛњЗРХізВЙІФмЁЃ
ЁЁЁЁЪЕЯжШЮвтвЛЬЈЦ№жиЛњЖдШЮвтвЛеХдЖГЬВйПизРЕФAny-to-AnyСЌНгМАжЧФмЧаЛЛЃЌМЋДѓИФЩЦСЫЦ№жиЛњЫОЛњЕФЙЄзїЛЗОГВЂЬсЩ§ЙЄзїаЇТЪЁЃ
ЁЁЁЁЖдЦ№жиЛњБОЬхCMSЯЕЭГНјааМЏГЩЃЌдкRCOSЦНЬЈдЖГЬЪЕЪБЕїШЁCMSЫљгааХЯЂЃЌЪЕЯжЦ№жиЛњБОЬхЙЪеЯЕФЪЕЪБеяЖЯгыМАЪБДІРэЃЌЬсИпЩшБИЮЌЛЄЕФМАЪБадЁЃ
ЁЁЁЁдЖГЬВйПиЦНЬЈжЇГжащФтЛЗОГВПЪ№ЃЌдкЯюФПЪЕЪЉЧАЦкНјааащФтВтЪдЃЌНкЪЁЯжГЁЕїЪдЪБМфЁЃ
ЁЁ
ЁЁЁЁЯжГЁзївЕЩшБИ
ЁЁЁЁ

ЁЁЁЁдЖГЬВйПиЦНЬЈЃЈгЩЯюФПКЯзїЗНКМжнЛЊаТЬсЙЉЃЉ
ЁЁЁЁПЭЛЇЪевц
ЁЁЁЁЮїУХзгНЋздЖЏЛЏММЪѕгыТыЭЗаЖДЌОбщЩюЖШНсКЯЃЌФЃФтШЫЙЄЬЭВждкМзАхЯТШЁСЯЃЌНЋздЖЏЛЏзївЕТЪДгдЯШЕФ50%ЬсИпЕН70%-80%ЃЌНЕЕЭЫОЛњЪжЖЏНщШыЦЕТЪЃЌШУаЖДЌЛњДгвЛЖдвЛВйзїЕНвЛЖдЖрЬЈВйзїГЩЮЊПЩФмЁЃ
ЁЁЁЁаавЕСьЯШЕФзЅЖЗБеЛЗЗРвЁММЪѕЃЌЕуЖЏЁЂЪжЖЏЁЂздЖЏФЃЪНЯТОљПЩгУЃЌздЖЏМьВтПьЫйЮШЖЗЃЌДѓЗљНЕЕЭЫОЛњРЭЖЏЧПЖШЁЃ
ЁЁЁЁЮїУХзгЯШНјЕФSIMOTIONдЫЖЏПижЦММЪѕНсКЯЮїУХзгЖРЬиЕФвЁАкПижЦЯЕЭГЃЌзюДѓГЬЖШМѕЛКаЖДЌЛњЙЄзїжаЕФЛњаЕГхЛїЃЌМѕЩйзЅЖЗЕФШеГЃЮЌЛЄЦЕТЪЃЌВЂДѓЗљЖШбгГЄИжЫПЩўЕФЪЙгУЪйУќЃЌНЕЕЭПЭЛЇЮЌаоГЩБОВЂМѕЩйЭЃЛњЪБМфЁЃ
ЁЁЁЁгъЮэДѓЗчПЩзївЕЃЌЬиЪтЬьЦјФЃЪНПЩдкБЃжЄАВШЋЕФЧАЬсЯТздЖЏНЕЫйдЫааЃЌзюДѓГЬЖШБмУтШЫЙЄаЖДЌЪБвђЪгвАЪмЯоЕМжТЕФЛѕДЌжЭСєЃЌЬсИпТыЭЗАЖЯпРћгУТЪЁЃ