TwinCAT/BSDHypervisor作为一个新系统的功能
TwinCAT/BSDHypervisor是倍福TwinCAT/BSD操作系统的一个系统功能,通过它可以在工业PC上同时运行虚拟机(VM)和TwinCAT实时控制程序。在TwinCAT/BSD中优化了Hypervisor管理程序,再匹配上倍福软件和硬件可以最大化地发挥虚拟机的性能,同时保持TwinCAT的实时特性。
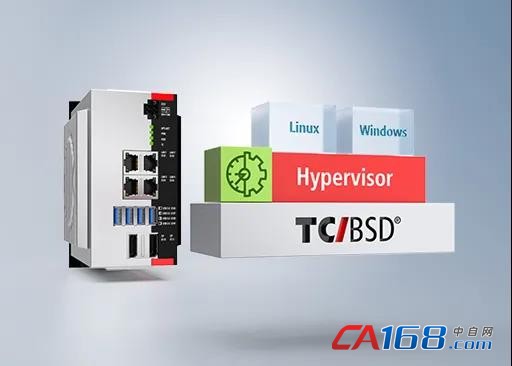
TwinCAT/BSDHypervisor可以在一台倍福工业PC上高效地执行虚拟机和TwinCAT实时控制程序,可以显著提高控制系统的安全特性。
虚拟机的高性能运行可以让不同操作系统的优势在一台工业PC上得到充分利用,并通过模块化运行操作系统和核独立的方式执行实时控制,改善了整个系统的安全性能。例如,TwinCAT实时控制程序可以与工业PC上的Windows桌面操作系统分开运行。在这种情况下,Windows操作系统运行在虚拟机环境中。例如,Windows软件更新需要重启系统时将不会中断设备控制的实时执行。这可以确保设备的持续可用性,因为Windows仅在虚拟机环境中重启,TwinCAT仍继续在TwinCAT/BSD主机的实时环境中运行。
通过TwinCAT/BSDHypervisor的深度集成功能,可以将GPU、USB和/或网络接口等硬件资源完全分配给虚拟机。这样就可以限制用户和/或网络接口对TwinCAT/BSD系统的访问,而且可以提高控制系统的安全性。通过TwinCAT/BSDHypervisor,除了Windows之外,还可以在控制器上运行Linux发行版,例如,用于运行Linux容器。在这种情况下,Linux容器和设备控制器之间的数据通信可以通过仅主机网络支持,以确保未加密的网络通信仅在TwinCAT/BSD和Linux容器主机之间进行,机密的设备运行数据不会离开工业PC。
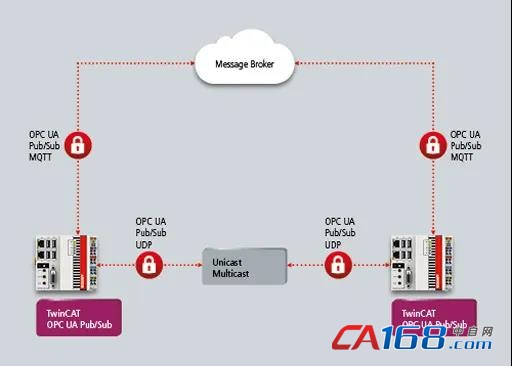
通过OPCUA实现实时数据通信
TwinCAT3:直接集成OPCUAPub/SubUDP
将OPCUAPub/Sub通信直接集成到TwinCAT3Runtime中,为直接实现基于OPCUAPub/Sub规范的机器对机器(M2M)和设备到云(D2C)通信方案铺平了道路。
借助基于PC的控制技术和TwinCAT3,倍福将一如既往地支持OPCUA的扩展,包括发布者/订阅者通信模式。
随着OPCUA规范的最新扩展—其中,倍福在协助开发方面发挥了重要作用—,发布订阅的通信模式正被引入到成熟、标准化的OPCUA通信协议中。可以为数据传输定义两种不同的传输路径:UDP和MQTT。
UDP能够在机器或机器组件之间的本地网络中实现高效、实时的数据交换,而通过MQTT消息代理进行的传输主要(但不限于)支持云服务应用场景。作为早期践行者,倍福早在2016年就实现了UDP传输路径的初始原型实施。现在,MQTT的实施增加了第二个传输路径。倍福新推出的TwinCAT3功能组件OPCUAPub/Sub(TF6105)是一个软件包,可以用于在TwinCAT3中直接配置和使用OPCUAPub/SubUDP和MQTT发布者和订阅者。
通过大胆决策和创新驱动实现超高性能
TwinCAT:拥有25年成功经验的自动化套件
倍福基于PC的控制技术于1986年推出,至今已有35年的历史,而TwinCAT自动化套件于1996年面世,转眼已经度过了四分之一个世纪。值得一提的是,TwinCAT是基于Windows的控制和自动化技术的简称。用户不仅受益于软件的高性能,尤其还能够受益于其模块化设计和可扩展性,以及对机器视觉和人工智能等创新技术的支持。

TwinCAT是一个模块化的自动化软件套件,它将标准控制功能与机器人技术、机器视觉和人工智能等功能无缝集成在一起。
1996年,第一代软件TwinCAT2问世。该版本至今仍在使用并将继续供应,这也证明了它的连续性和兼容性。其操作系统使用的是Windows,PLC编程符合IEC61131-3标准。现在可以在安装了标准操作系统的“普通”PC上实施控制系统。另一个里程碑是将TwinCAT编程环境与主流IT编程环境相统一的决定。MicrosoftVisualStudio?原本主要用于IT软件的开发,那么为什么不也使用VisualStudio?开发PLC软件应用程序呢?Beckhoff便使用此工具嵌入TwinCAT2软件进行开发。正因为这样,TwinCAT3软件于2010年推出,并从2011年开始交付给客户,因此TwinCAT3迄今也有10年的历史,并创造了另一个记录。
将TwinCAT工具集成到VisualStudio?中可以创建一个全新的开发环境。C/C++和MATLAB?/Simulink?等更多“编程语言”的出现为更高效地生成设备和系统代码提供了进一步的可能性。这又是一个大胆而正确的企业决策。除了编程之外,TwinCAT还为不同的现场总线系统提供了一个I/O配置接口,首要的就是EtherCAT。从简单的PTP运动到复杂的CNC和机器人等运动控制应用与安全功能、机器视觉的图像处理和机器学习一样,都是技术不断发展的一部分。随着工业4.0和物联网(IoT)的出现,很快人们就发现,在IT领域长期存在的云计算将在自动化市场上也变得非常重要。而倍福早在2015年就已经提出了物联网和云连接解决方案。
电动缸将电力和动态性与伺服技术的优势结合于一体
AA3000系列:高耗能气缸的伺服电机替代解决方案
AA3000系列电动缸非常适合用作直驱装置,用于实现高加工力和高速度的线性应用。它充分利用了伺服技术在力、动态性和紧凑性方面的优势,如可控定位、堵转时的保持制动器和高能效。

AA3000系列电动缸可以取代高能耗的气缸,同时充分利用了伺服电机的高动态性、高精度和性能优势。
这款集成有高精度滚子轴承、滚珠丝杆和导轨的机构可用于实现无背隙的纯平移运动,这样也可以让结构非常紧凑。主轴的轴端有一个外螺纹,可以在上面安装市售适配器,如气动/液压应用中常用的球头或张紧钩。
新系列的第一个产品是AA3033电动缸,它有两个型号:
峰值推力12500N,持续推力3700N,最大速度0.5m/s
峰值推力6250N,持续推力1850N,最大速度1.0m/s。
兼容气动系统,性能更高
电动缸的法兰尺寸符合ISO15552标准,两侧都有螺栓连接节点,例如,如果应用中需要旋转螺栓连接。这种兼容性让从气动到电动驱动技术的转换变得特别容易。除了高分辨率之外,所安装的24位多圈安全编码器还采用了单电缆技术(OCT)和电子铭牌,使得调试更简单、更快速。此外,电动缸能够轻松获取过程数据,这些数据可用于快速、轻松地优化加工性能。其它螺距或无背隙保持制动器可作为选项提供。
关于德国倍福
倍福(Beckhoff)公司总部位于德国威尔市。作为全球自动化技术的驱动者,倍福定义了自动化领域的许多国际标准。公司所生产的工业PC、现场总线模块、驱动产品和TwinCAT自动化软件构成了一套完整的、相互兼容的控制系统,可为各个工控领域提供开放式自动化系统和完整的解决方案。倍福于1997年进入中国市场,致力于帮助制造企业提升竞争优势,加速转型升级。倍福在业内享有“创新引擎”的美誉,公司所倡导的PC控制技术具有良好的开放性,将IT技术、互联网和自动化技术完美融合,助力实现工业4.0和智能制造。凭借领先的技术优势和丰富的行业知识,倍福的创新产品和解决方案广泛应用于风力发电、半导体、光伏太阳能、电子制造、金属加工、包装机械、物流输送以及楼宇自控等众多领域。
更多信息,请登录Beckhoff中文官方网站:www.beckhoff.com.cn