


长江网6月13日讯 身长2厘米、体重0.3克,身段柔软小巧灵活,能指哪去哪儿、上下陡坡、负载重物。日前,武汉大学动力与机械学院材料学博士生汪鑫在导师的帮助下研制出一款软体机器人,预期可在废墟狭缝、生物体内完成多种复杂作业。
“制作这种软体机器人,最快一个小时就可以完工。”汪鑫介绍,这个名为Geca-Robot的小家伙有着自己的“脚”和“肌肉”。它以仿壁虎刚毛的微米三棱柱阵列作为“脚”,以交替排列的透明PDMS条带和石墨烯/PDMS复合材料(GP)条带组成“肌肉”。步态则是借鉴了壁虎脚的取向黏附能力和尺蠖前后足交替运动模式。在光照(紫外到红外光全波段均可)时,前足向前移动,关闭光照时,后足向前移动;交替的开关光照则驱动它不断向前运动。
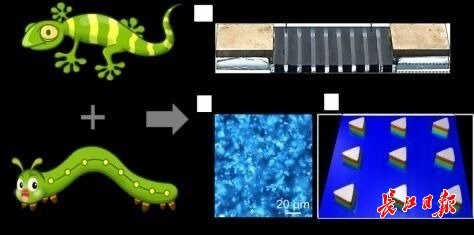
图为软体机器人Geca-Robot。汪鑫供图
近日,汪鑫以第一作者身份,在材料领域顶尖期刊Materials Today(《今日材料》)上介绍了这种具备定向全地形运动能力的仿生有足软体机器人。
论文通讯作者、汪鑫的导师、武汉大学动力与机械学院教授薛龙建告诉长江网记者,该项研究灵感来源于两种动物,即壁虎和尺蠖。壁虎脚掌上的独特刚毛结构可以使其在各种地形上进行稳定快速的运动,这正好可以解决目前小尺寸软体机器人对运动表面适应性较差的问题。因此,他们尝试向机器人上引入仿壁虎脚趾刚毛的足部,让机器人具有良好表面适应性。
据悉,软体机器人相较于传统刚性机器人,往往具有更大的自由度和变形能力,在生产生活、医疗救援等领域具有巨大的应用潜力,受到科研工作者的广泛关注。然而,小尺寸软体机器人的足部设计却很少被注意到,许多机器人甚至缺乏足部设计。由于没有良好的足部设计,软体机器人往往需要粗糙表面或具有特殊结构的基底表面来提供前进运动的反作用力,运动过程很难精确控制。而且,在光滑、倾斜或是有水的表面等,机器人的运动能力也可能受到限制。
“因为动能是光,软体机器人成本很低。”薛龙建教授表示,Geca-Robot的仿生足部结构相当于给它穿上了最好的“防滑跑鞋”,不管是在粗糙或是光滑平面上,均能获得足够的抓地力而不会打滑。未来该机器人的尺寸还可以更小,达到毫米级,甚至能游走到人体血管,向生物医疗方向发展。













