ЁЁЁЁ1.гІгУЬєеН
ЁЁЁЁЫцзХШЫУЧЖдЮяСїдЫЪфЕФашЧѓгыШеОудіЃЌздЖЏЕМКНаЁГЕдкВжДЂКЭЩњВњЮяСїжаЕФЪЙгУвВдНРДдНЦеБщЁЃЮЊСЫИќКУЕиЭъГЩдЫЪфШЮЮёЃЌЮвУЧПЩвддкЭЌвЛИіЙЄГЇФкЃЌЪЙгУВЛЭЌРраЭЕФГЕСОЃЌШчздЖЏЕМв§ГЕСОЃЈAGVЃЉКЭзджївЦЖЏЛњЦїШЫЃЈAMRЃЉЁЃШЛЖјЃЌетСНепжЎМфДцдквЛаЉЧјБ№ЃЌИљОнЪЕМЪгІгУЕФЙцФЃМАРраЭЃЌГЕСОЕФЖЈЮЛКЭЕМКНЖдДЋИаЦїгазХВЛЭЌЕФММЪѕвЊЧѓЁЃЭЈГЃЃЌздЖЏЕМв§аЁГЕAGVбиЙЬЖЈТЗЯпааЪЛЃЌЮоашШЦааЃЌвђДЫдЫЪфЛѕЮяЕФЫйЖШЯрЖдНЯПьЁЃЖјзджївЦЖЏЛњЦїШЫAMRдђИќЮЊСщЛюЃЌAMRАДзджїЙцЛЎМЦЫуТЗОЖааЪЛЃЌФмБмПЊеЯАЮяЃЌЮЊЮяСїдЫЪфЬсЙЉИќЖрЕФСщЛюадЁЃ
ЁЁЁЁ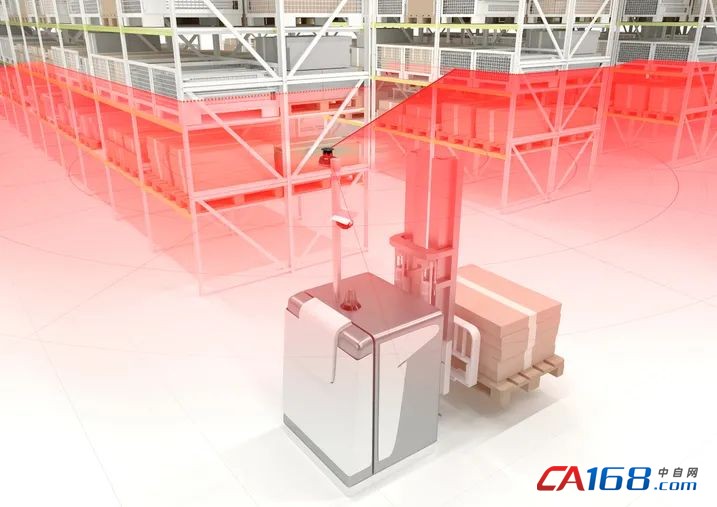
ЁЁЁЁ2.ФПБъ
ЁЁЁЁЮЊСЫШЗБЃздЖЏЕМКНаЁГЕзМШЗЕиДгAЕуЕМКНЕНBЕуЃЌЫљЪЙгУЕФДЋИаЦїММЪѕБиаыФмЙЛдкздЖЏЕМКНаЁГЕааЪЛЙ§ГЬжаЃЌЪЕЪБЮЊГЕСОПижЦЯЕЭГЬсЙЉПЩППЕФЮЛжУЪ§ОнЁЃДЋИаЦїашвдЫљашЕФОЋЖШЃЌЛцжЦЛЗОГЕиЭМЃЌВЂЧвФмЙЛЭЈЙ§ПижЦЯЕЭГЖдБфЛЏЕФЛЗОГзіГіЖЏЬЌЕїећМАЪЪЕБЗДгІЁЃР§ШчЃЌДЋИаЦїашвЊМАЪБМьВтааНјТЗОЖжаЕФеЯАЮяЃЌвдШЗБЃФмПЩППБмеЯЁЃДЫЭтЃЌВЛЭЌГЕСОЩЯЫљАВзАЕФДЋИаЦївВБиаыБмУтЯрЛЅИЩШХЁЃ
ЁЁЁЁЕБгІгУашвЊИпОЋЖШЕМКНЪБЃЌПЩЪЙгУЗДЩфФЄРДШЗЖЈЗНЯђЃЌЛђепЪЙгУТжРЊЕМКНРДШЗЖЈздЖЏЕМКНаЁГЕЕФЮЛжУЁЃ
ЁЁЁЁ3.НтОіЗНАИ
ЁЁЁЁ
ЁЁЁЁR2000ЯЕСаЙтЕчДЋИаЦїВЩгУИпадФмЕФТіГхВтОрММЪѕЃЈPRTЃЉЃЌЭЈЙ§2-DLiDARДЋИаЦїЪЕЯжСЫ360ЖШПЩЪгЛЏЪгНЧКЭКСУзМЖЕФОЋЖШШЗЖЈОјЖдЮЛжУЃЌДгЖјЬсЙЉСЫИпОЋЖШЕФЮЛжУВтСПЁЃДЫЯЕСаДЋИаЦїМЏГЩСЫЗДЩфФЄВтСПКЭТжРЊВтСПСНжжЙІФмЃЌМьВтЗЖЮЇПЩИљОнЫљашГЕСОРраЭЕФвЊЧѓНјааСщЛюЕїећЁЃетбљЃЌЪЙгУR2000ДЋИаЦїПЩвдЬсЙЉИпОЋЖШЕФЖЈЮЛКЭЕМКНММЪѕЃЌШЗБЃГЕСОааЪЛЕФАВШЋадКЭПЩППадЁЃ
ЁЁ
ЁЁЁЁ2-DLiDARДЋИаЦї
ЁЁЁЁММЪѕЬиад
ЁЁЁЁЁі360°ПЩЪгЛЏ
ЁЁЁЁЁіНЧЗжБцТЪИпДя0.014°
ЁЁЁЁЁіздШЛФПБъЮяМьВтЗЖЮЇПЩДя60mЃЌЗДЩфФЄМьВтЗЖЮЇПЩДя200m
ЁЁЁЁЁіВтСПЪ§ОнЩшжУЪБМфДСЃЌБугкЭЌВН
ЁЁЁЁЁі50HzИпЩЈУшЫйТЪЃЌЪЪгУгкИпЫйгІгУ
ЁЁЁЁ4.ВњЦЗгХЪЦ
ЁЁЁЁЭЈЙ§ЪЙгУ2-DLiDARДЋИаЦїЃЌВтСПЪ§ОнжазМШЗЕФЪБМфДСКЭЪ§ОнТЫВЈЃЌПЩвдАяжњЩшБИЪЪгІГЕСОПижЦЯЕЭГЃЌДгЖјЪЕЯжИпОЋЖШЕФЖЈЮЛКЭЕМКНЁЃНЛЛЅЪНЩшжУЙІФмвВДѓДѓМђЛЏСЫЕїЪдЙ§ГЬЁЃR2000ЯЕСаДЋИаЦївдЦфИпНЧЗжБцТЪКЭЗЧГЃаЁЕФЙтАпЃЌБЃжЄСЫИпЖШзМШЗЕФЮЛжУВтСПЁЃДЫЭтЃЌДЋИаЦїВЩгУНєДеаЭЩшМЦЃЌвзгкМЏГЩЃЌВЂЧвЪЪгУгкИїжжРраЭЕФГЕСОЃЌМДЪЙЪЧаЁаЭГЕСОвВПЩвдЪЙгУЁЃ
ЁЁЁЁДЋИаЦїВЩгУИпФмСПУмЖШЕФМЄЙтТіГхКЭжЧФмЕФТЫВЈЛњжЦЃЌПЩвдЗРжЙЛЗОГЙтгАЯьЖдВтСПНсЙћВњЩњИЩШХКЭХЄЧњЁЃЭЌЪБЃЌШчЙћдкЭЌвЛЧјгђгаЖрИіздЖЏЕМКНаЁГЕдЫааЃЌвВПЩвдКмДѓЯоЖШЕиНЕЕЭЩљВЈИЩШХЕФПЩФмадЃЌШЗБЃВтСПНсЙћЕФОЋШЗЖШКЭЮШЖЈадЁЃ
ЁЁЁЁ5.ВњЦЗЬиад
ЁЁЁЁССЕу
ЁЁЁЁЁіКСУзМЖЕФЮЛжУЪ§ОнЃЌдкЖЏЬЌгІгУжаЪЕЯжПьЫйзМШЗЕиПижЦздЖЏЕМКНаЁГЕЁЃ
ЁЁЁЁЁізМШЗЕФЪБМфДСКЭВтСПЪ§ОнТЫВЈЦїЃЌБугкМЏГЩЕНГЕСОЕФПижЦЯЕЭГжаЁЃ
ЁЁЁЁЁіНЛЛЅЪНВЮЪ§ЩшжУЃЌБугкЕїЪдЁЃ
ЁЁЁЁЁіВЩгУНєДеаЭЩшМЦЃЌПЩвдАВзАдкаЁаЭГЕСОКЭЪмЯоПеМфжаЁЃ