今天,机器人正被应用于那些先前不曾使用机器人的生产领域。针对不同的情况,必须始终分别考虑各个安全方面并针对每种应用实施合适的安全解决方案。安全的传感器技术举足轻重:为了满足所有安全相关的应用,需要采用满足传感器需要的模块化方法。
目前很多使用机器人的应用都具有很高的自动化水平。生产过程中无需人力介入。为了保证此类应用中的安全和可用性,可以使用机械防护装置来封闭设备和机械。
一般而言,只有在进行维修时才需要访问机器人单元。针对这种类型的访问授权,可以使用安全门,不过必须通过安全门传感器提供保护。在安全门被打开时,会被传感器探测到,传感器将发出关闭信号并传送至安全机械控制系统。
基本保护及其它保护
各种不同的驱动原理和设计的使用,要根据要求、安装和基于应用的边界状况来确定。
非接触式、安全的磁传感器是用于隐蔽式安装的一种非常经济的解决方案,在安装时,诸如PSENcode安全开关等基于无线射频识别技术研发的安全传感器赋予了最大的自由度,并能保证尽可能实现最大限度的操作保护。
例如,在空间很有限时,若保护装置需要靠近危险的运动,危险的超速运动可能带来危害。在这种情况下,使用安全防护锁定设备是完全有必要的。PSENmech等带弹簧连锁的机械防护锁定设备或PSENsgate和PSENslock等集成安全门系统可以完成这些任务。
有多种单元类型符合这些技术传感器原理,因此可以实施几乎所有可能的监控方案。
例如,皮尔磁公司提供的编码式安全开关PSENcode在机器人辅助的车体制造厂的各个领域均有应用;这些开关仅用一个传感器就能监控多达三个位置。例如,在这种情况下,可以将其应用于人和机器人接触的界面,此时需要人工介入以安装并拆卸由保护装置封闭的机器人单元的金属部件。
例如,在需要人工控制、嵌入零件或返修的机器人应用中,经常采用包括安全光幕在内的电敏防护设备来提供进出保护。
可能需要在保护区域后部安装保护装置以防止违规进入,可以采用垂直安装安全光幕或安全激光扫描仪的形式。例如,若光学系统因过程相关的边界状况(如灰尘、烟、雾或蒸汽)不可用时,很多情况下安全地毯是首选。
何时可以实现人与机器人的合作
人与机器人合作是一个全新的领域。在理想的情况下,人和机器人可以在同一工作区域工作。通过结合机器的优势(如可靠、耐久和重复精度)和人的长处(如敏捷和灵活性),这些新型应用可带来协同效应并因此推动生产力的提高。
采用这种类型的人和机器人合作,人和机器人的工作区域在空间和时间上都可以重合。人与机器人的合作,尤其是在服务机器人领域,是很好的范例。此时通常采用低负载机器人,用于如选取和放置等应用。
通过机器人内部或表面的安全组件和安全功能来尽力实现应用安全。例如,将机器人的安全运动功能与近距离传感器、机器人中的集成扭矩监控或机器人周围的触觉传感器技术相结合。一般而言,机器人在这种应用中的运动要比在完全自动化的应用中慢得多。目前,这种安全理念的实施领域是同人和机器人合作相关的服务型机器人部门;当满足其它安全要求时,也可以实施该应用。
无危险区—动态保护
当采用更高负载的机器人实施人与机器人合作时,上面详述的安全理念将达到极限,这时需要考虑其它安全理念。需要对事件进行更清晰且分等级的评估。例如,它必须能够区分是否有人进入危险活动的潜在作用半径(警告区域),还是已经进入了具有更高安全要求的区域(探测区域)。例如,它最好能动态地调整这些区域并跟踪机器或机器人处于安全监控下的运动。在这种情况下,可以实现静态安全防护已达极限的人与机器人合作。
新的基于摄像机的过程,例如由三维摄像系统SafetyEYE提供的用于监控安全区域的过程,能够从多个维度安全地监控保护区域和探测区域。该类传感器系统因其三维工作原理,为应用设计提供了新的可能性。此外,在过程中的每一步,都可以对探测区域安排进行重新调整。
该领域的进一步发展取决于未来应用的要求:将安全的机器人与安全三维摄像系统以及更好的通信相结合,可以合并并优化各个严格分离的流程步骤。安全的机器人了解其安全位置、安全速度及安全运动方向;安全的摄像系统了解机器人工作范围周围的物体(人)的位置。未来整个系统能更灵活地做出反应,而不是死板地关机,从而避免不必要的停机时间并提高设备生产力。
用于安全机器人的模块化技术
确定无疑的是,人与机器人合作的比例将会升高,但提升的速度很大程度上取决于传感器技术和机器人科学的创新。即使在未来,可能也没有一个安全机器人或一种安全的传感器技术能涵盖所有可能的与安全相关的应用案例。
这正是需要一种模块化系统的原因,这种系统包括各种技术,用户可从中选择合适的工具。
每个机器人应用都需要进行单独的安全相关的评估。从根本上来说,安全的人与机器人合作应用是多个因素共同作用的结果:规范的框架条件和以此为基础的复杂风险分析之间的相互作用,选择具备相关安全功能的机器人,选择合适、附加的安全组件以及最后通过系统集成商开展的验证。

即使在机器人应用中,皮尔磁公司提供的三维的安全摄像系统SafetyEYE也能确保无障碍安全。
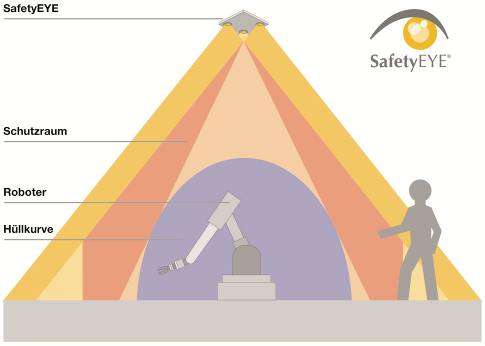
安全三维摄像系统SafetyEYE探测进入警告区域和探测区域的物体,上述区域可自由界定。
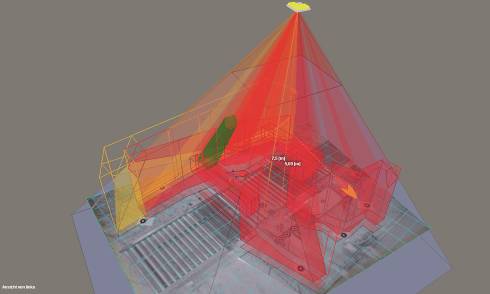
通过采用SafetyEYE配置器,可以在被监控物体的周围设置多个虚拟的警告或探测区域。

用于演示:在操作员进入界定为探测区域的机器人作业范围时,安全系统将立刻启动急停。